cseweb.ucsd.edu/~tzli/novelt...
I gave an internal talk at UCSD last year regarding "novelty" in computer science research. In it I "debunked" some of the myth people seem to have about what is good research in computer science these days. People seemed to like it, so I thought I should share.
09.01.2026 17:21 — 👍 75 🔁 25 💬 2 📌 2
Our new E2E driving method, TransFuser v6, is out on ArXiv.
It outperforms all other methods on CARLA by a wide margin, 95 DS on Bench2Drive!
We show that minimizing the asymmetry between data annotator and policy is key for strong IL results.
Code, models, and paper:
ln2697.github.io/lead/
27.12.2025 01:42 — 👍 30 🔁 6 💬 0 📌 1

Why study self-driving?
Isn't it "solved"?
What's left to do in self-driving given Waymo is taking off? An argument that it's still a great research problem:
open.substack.com/pub/emergere...
21.12.2025 04:21 — 👍 62 🔁 8 💬 1 📌 0

Attending #Neurips2025? Get your personalized Scholar Inbox conference program now to easily navigate the poster sessions and find what you are looking for:
www.scholar-inbox.com/conference/n...
02.12.2025 06:37 — 👍 34 🔁 12 💬 0 📌 0
Scholar Inbox for NeurIPS is live now.
01.12.2025 19:44 — 👍 14 🔁 5 💬 0 📌 2
Launching the Physical AI AV Dataset! 🚀
huggingface.co/datasets/nvi...
One of the largest, most diverse & commercially usable open-source datasets for AVs.
- 1727 hours of driving data
- Camera, LiDAR, & radar
- 25 countries, 2500+ cities
This is just the beginning, more features to come!
28.10.2025 17:59 — 👍 28 🔁 7 💬 0 📌 0

Takeru Miyato - AI Research Scientist
PhD student at University of Tübingen working on artificial intelligence, machine learning, and deep learning research.
Congratulations to our PhD student @takerumiyato.bsky.social for winning the Google PhD Fellowship in the category "Machine Learning and ML Foundations". Takeru is pioneering new neural architectures that improve generalization and efficiency. Check out his research: takerum.github.io
24.10.2025 07:37 — 👍 29 🔁 3 💬 0 📌 1
🚗 Join us for the RealADSim Workshop @ ICCV 2025!
🗓 Oct 19 morning | 📍 Hawaii Conv. Center, 305A
Featuring exciting talks and winner presentations from our challenges (70+ regs, ~30 subs). Don’t miss it! 🎉
#ICCV2025
19.10.2025 06:13 — 👍 7 🔁 4 💬 0 📌 0

Announcing the @iccv.bsky.social NAVSIM Challenge! What's new? We're testing not only on real recordings, but also perturbed futures generated from the real ones via pseudo-simulation! $8K in prizes + several $1.5k travel grants. Submit by September 20! opendrivelab.com/challenge2025/ 🧵👇
01.09.2025 09:14 — 👍 14 🔁 9 💬 1 📌 1
Christian will be mind-blown, once he finds out about Corsairs VENGEANCE RGB DDR5 Light Enhancement Kit. Still mind blowing to me, that this product exists.
13.08.2025 08:12 — 👍 2 🔁 0 💬 0 📌 0
The RGB RAM sticks give at least 10-20 FPS more.
13.08.2025 08:08 — 👍 2 🔁 0 💬 0 📌 0

NeurIPS PCs: Borderline Reject: "Please use sparingly"
NeurIPS reviewers: BR go BR BR BR BR BR BR
12.08.2025 09:43 — 👍 22 🔁 2 💬 3 📌 0
Civil Software Licenses
One concern that I have as an AI researcher when publishing code is that it can potentially be used in dual-use applications.
To solve this, we propose Civil Software Licenses. They prevent dual-use while being minimal in the restrictions they impose:
civil-software-licenses.github.io
31.07.2025 17:36 — 👍 16 🔁 3 💬 3 📌 0
New YouTube playlist category is Relaxing self-driving agents to vibe to
15.07.2025 18:55 — 👍 14 🔁 1 💬 0 📌 0
GitHub - autonomousvision/CaRL: [ArXiv 2025] CaRL: Learning Scalable Planning Policies with Simple Rewards
[ArXiv 2025] CaRL: Learning Scalable Planning Policies with Simple Rewards - autonomousvision/CaRL
We have released the code for our work, CaRL: Learning Scalable Planning Policies with Simple Rewards.
The repository contains the first public code base for training RL agents with the CARLA leaderboard 2.0 and nuPlan.
github.com/autonomousvi...
15.07.2025 16:05 — 👍 20 🔁 7 💬 0 📌 2
Back in 2023, I worked on rule-based planning for the nuPlan challenge and was skeptical that learned methods could do well on this benchmark. Turns out, RL is the answer. The CaRL code is out now. Also check out this 2h+ demo video of our policy: youtu.be/_godUKkICec
15.07.2025 16:39 — 👍 4 🔁 1 💬 0 📌 0
YouTube video by Daniel Dauner
CaRL: Learning Scalable Planning Policies with Simple Rewards
In case you find it as relaxing as we do: Here is a 2h+ video of our autonomous RL driving agent CaRL in action! @danieldauner.bsky.social @bernhard-jaeger.bsky.social @kashyap7x.bsky.social
youtube.com/watch?v=_god...
15.07.2025 06:17 — 👍 21 🔁 5 💬 0 📌 1

Christina's new work PrITTI generates high-quality, controllable 3D semantic urban scenes in a compact primitive-based representation using a latent diffusion model. This enables applications like scene editing, inpainting, and photo-realistic street view synthesis!
raniatze.github.io/pritti/
25.06.2025 11:23 — 👍 13 🔁 7 💬 0 📌 0
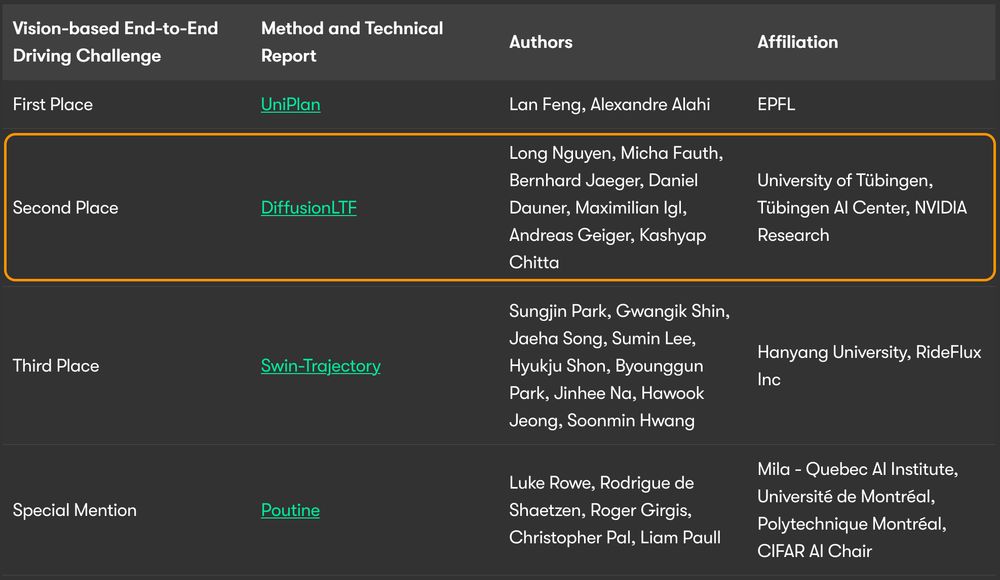
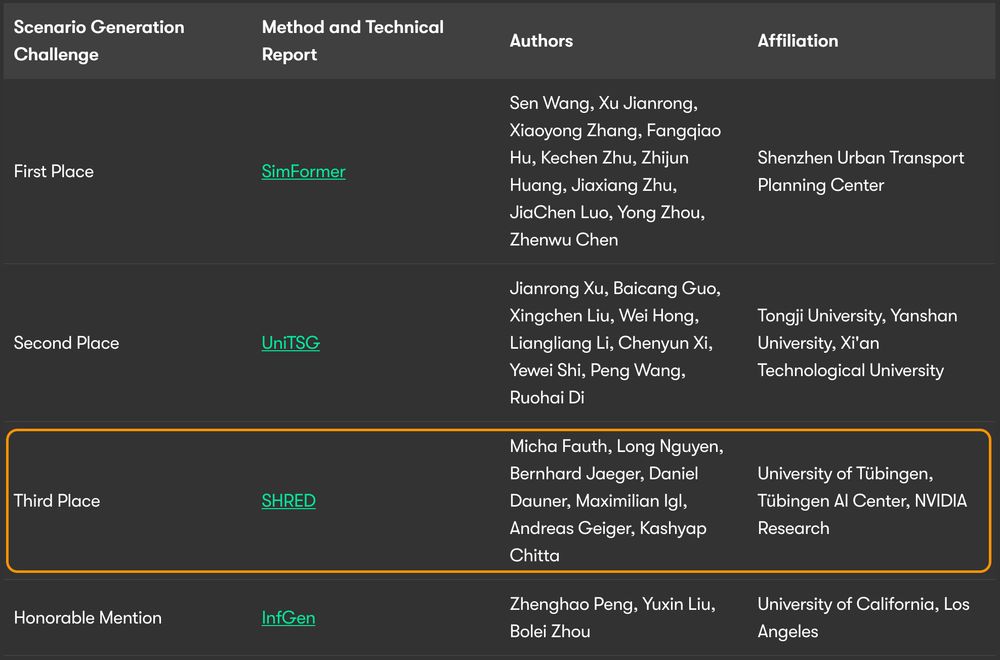
The 2025 Waymo Challenge results are out! We achieved second place in the End-to-End Driving Challenge with DiffusionLTF and third place in the Scenario Generation Challenge with SHRED. Our approaches prioritized simplicity, and we're preparing to make them publicly available soon.
17.06.2025 21:36 — 👍 15 🔁 5 💬 1 📌 0
Is it? Sometimes it's the unexpected results that reveal something more interesting.
05.06.2025 08:00 — 👍 1 🔁 0 💬 1 📌 0

🚗 Pseudo-simulation combines the efficiency of open-loop and robustness of closed-loop evaluation. It uses real data + 3D Gaussian Splatting synthetic views to assess error recovery, achieving strong correlation with closed-loop simulations while requiring 6x less compute. arxiv.org/abs/2506.04218
05.06.2025 04:21 — 👍 22 🔁 10 💬 0 📌 1
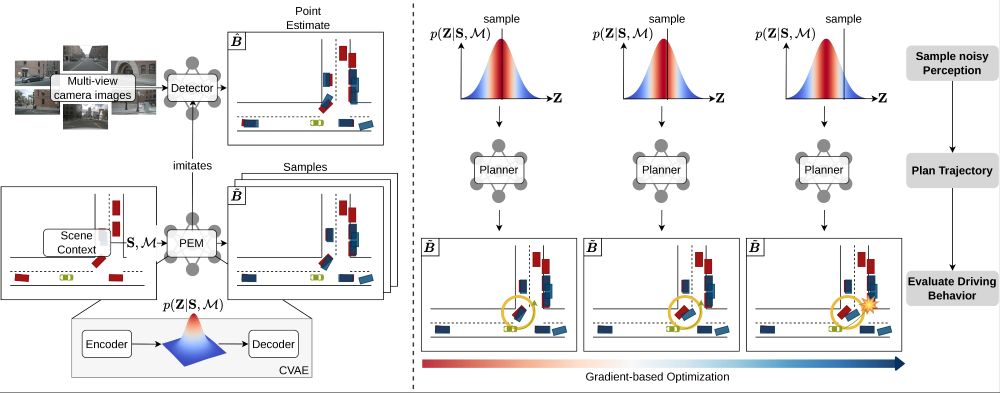
EMPERROR is a new generative perception error model for probing self-driving planners. It imitates modern 3D detectors, maintains temporal consistency, and reveals brittleness in IL-based planning - raising collision rates by up to 85%! #RA_L #robotics #AI - lasnik.github.io/emperror/
16.05.2025 13:54 — 👍 9 🔁 4 💬 1 📌 0
📣 Excited to share our #CVPR2025 Spotlight paper and my internship project @wayve: SimLingo.
A Vision-Language-Action (VLA) model that achieves state-of-the-art driving performance with language capabilities.
Code: github.com/RenzKa/simli...
Paper: arxiv.org/abs/2503.09594
08.05.2025 15:25 — 👍 25 🔁 9 💬 1 📌 0
GitHub - G-dH/advanced-alttab-window-switcher: A highly customizable replacement for Gnome Shell's Alt-Tab window and app switchers.
A highly customizable replacement for Gnome Shell's Alt-Tab window and app switchers. - G-dH/advanced-alttab-window-switcher
I've always found the default Alt+Tab behavior in Ubuntu frustrating. Recently, I discovered this plugin for GNOME distros. Personally, it’s a game changer and enables switching windows specific to the application, monitor, and workspaces. Highly recommend!
github.com/G-dH/advance...
08.05.2025 07:43 — 👍 2 🔁 0 💬 0 📌 0
📢 New paper CVPR 25!
Can meshes capture fuzzy geometry? Volumetric Surfaces uses adaptive textured shells to model hair, fur without the splatting / volume overhead. It’s fast, looks great, and runs in real time even on budget phones.
🔗 autonomousvision.github.io/volsurfs/
📄 arxiv.org/pdf/2409.02482
05.05.2025 13:00 — 👍 32 🔁 21 💬 1 📌 1
How do you know someone's a Bayesian? Don't worry, they'll tell you.
30.04.2025 15:46 — 👍 1 🔁 0 💬 0 📌 0
Waited to finish reading it but I wanted to highlight the nice reward design here, which alleviates many of the failures of reward shaping
28.04.2025 22:16 — 👍 22 🔁 5 💬 1 📌 0
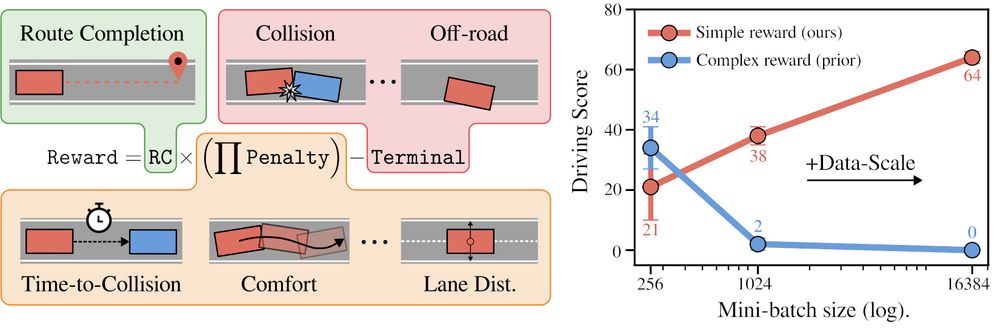
Introducing CaRL: Learning Scalable Planning Policies with Simple Rewards
We show how simple rewards enable scaling up PPO for planning.
CaRL outperforms all prior learning-based approaches on nuPlan Val14 and CARLA longest6 v2, using less inference compute.
arxiv.org/abs/2504.17838
28.04.2025 15:17 — 👍 25 🔁 14 💬 0 📌 1

⏰ Heads up! The deadline for two #CVPR2025 Autonomous Grand Challenge tracks is May 10th, 2025:
1️⃣ NAVSIM v2 Challenge: huggingface.co/spaces/AGC20...
2️⃣ World Model Challenge by 1X: huggingface.co/spaces/1x-te...
28.04.2025 09:41 — 👍 9 🔁 6 💬 1 📌 0
Senior Lecturer @QUT Centre for Robotics & ARC DECRA Fellow. Blending neuroscience and robotics for robot localisation & underwater perception.
RL Research Engineer, working in autonomous driving at Valeo
github.com/vcharraut
🔍3D Vision
https://bianwenjing.github.io/
YouTuber/app maker/tinkerer/catspotter
Content @ Ride_AI
Cohost @ Runtime: A 9to5 Podcast
Prev: founder @ MEKA, iOS & Anti Abuse @ Twitter, Leaf, Nitrogen
🏳️⚧️
https://youtube.com/@sophiat
https://probably.ninja
Assistant Professor @ ZJU
computer vision
https://yiyiliao.github.io/
Mathematician at UCLA. My primary social media account is https://mathstodon.xyz/@tao . I also have a blog at https://terrytao.wordpress.com/ and a home page at https://www.math.ucla.edu/~tao/
Professor for Visual Computing & Artificial Intelligence @TU Munich
Co-Founder @synthesiaIO
Co-Founder @SpAItialAI
https://niessnerlab.org/publications.html
PhD student | Aston University 🇬🇧 | Computer Vision | Self-supervision | Monocular Depth | Robotic Grasping | RobustDepth | BaseBoostDepth | more soon…
RS at Nvidia focussing on autonomous vehicles, simulation and RL. Opinions my own and do not represent those of my employer, Nvidia.
Postdoc at IBME in Oxford. Machine learning for healthcare.
https://www.fregu856.com/
A LLN - large language Nathan - (RL, RLHF, society, robotics), athlete, yogi, chef
Writes http://interconnects.ai
At Ai2 via HuggingFace, Berkeley, and normal places
Professor for "Machine Learning in Science", University of Tübingen.
Artificial Intellgence as a source of inspiration in Science.
https://mariokrenn.wordpress.com/
Machine learning scientist at Mercedes-Benz
Previously PhD student at Mercedes-Benz and
@tuebingen-ai.bsky.social @unituebingen.bsky.social
Pre-training lead at World Labs. Former research scientist at Google. Ph.D UWCSE.
📍 San Francisco 🔗 keunhong.com
Professor for Machine Learning, University of Tübingen, Germany
Researcher. Cities, urban morphology, human geography & spatial data science. Open source software developer. #python #cities #open_science
https://martinfleischmann.net
Open source #python software developer and teacher. Pandas core developer. GeoPandas and Shapely maintainer. Apache Arrow PMC.
Software engineer at fused.io