Ping everyone
11.04.2025 02:24 — 👍 1 🔁 0 💬 0 📌 0
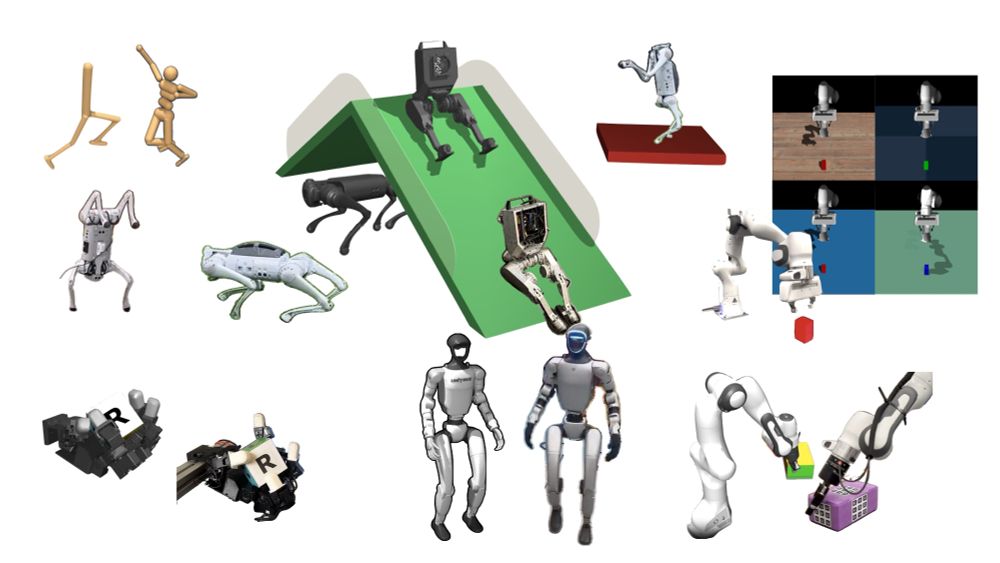
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
16.01.2025 20:48 — 👍 74 🔁 20 💬 1 📌 3
Title: Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning
Authors: Ilyass Taouil*, Lorenzo Amatucci*, Majid Khadiv, Angela Dai, Victor Barasuol, Giulio Turrisi, Claudio Semini
*Equal Contribution
Link to the paper: arxiv.org/abs/2408.07508
03.01.2025 10:16 — 👍 3 🔁 0 💬 0 📌 0
YouTube video by Dynamic Legged Systems lab
Non-Gaited Legged Locomotion with Monte-Carlo Tree Search and Supervised Learning (RA-L 25)
The combinatorial nature of contact planning in legged robots hinders the success of optimal control in navigating complex scenarios. In our recent RA-L paper, we demonstrate how sampling-based methods and supervised learning techniques can be coupled to search for a solution in real-time.
03.01.2025 10:16 — 👍 6 🔁 0 💬 1 📌 0

IEEE RA-L enters its double-blind era
30.12.2024 17:24 — 👍 8 🔁 1 💬 1 📌 0

LOT Spring School
Topics
🐱 Learning Over Time (LOT) Spring School
📅 24-27 March 2025 | 📍 Siena, Italy
💡 Are you considering models that continuously adapt over time instead of learning "offline" from pre-designed-huge collections of data? 🚀
🔗 sites.google.com/unisi.it/lot...
#ContinualLearning #CL #LifelongLearning
26.12.2024 14:39 — 👍 3 🔁 2 💬 1 📌 0

E61: Neurips 2024 RL meetup Hot takes: "What sucks about RL?"
What do RL researchers complain about after hours at the bar? In this "Hot takes" episode, we find out!
Recorded at The Pearl in downtown Vancouver, during the RL meetup after a day of Neurips 2024.
25.12.2024 16:50 — 👍 27 🔁 5 💬 1 📌 2


Yesterday the hyped Genesis simulator released. But it's up to 10x slower than existing GPU sims, not 10-80x faster or 430,000x faster than realtime since they benchmark mostly static environments
blog post with corrected open source benchmarks & details: stoneztao.substack.com/p/the-new-hy...
20.12.2024 23:49 — 👍 88 🔁 21 💬 4 📌 7
Thanks for the insight! Looking forward to the report!
19.12.2024 13:15 — 👍 1 🔁 0 💬 0 📌 0
I'm looking forward to a better cpu in the lineup! Maybe the novelty that apple brought in ARM can be go there as well.
10.12.2024 20:06 — 👍 1 🔁 0 💬 0 📌 0
It is a nice idea! Wondering why they chose to go for 4+1 pages instead of 6+. This can make people considering it not a "full" paper
10.12.2024 18:55 — 👍 1 🔁 0 💬 1 📌 0

Reinforcement Learning: An Overview
This manuscript gives a big-picture, up-to-date overview of the field of (deep) reinforcement learning and sequential decision making, covering value-based RL, policy-gradient methods, model-based met...
An updated intro to reinforcement learning by Kevin Murphy: arxiv.org/abs/2412.05265! Like their books, it covers a lot and is quite up to date with modern approaches. It also is pretty unique in coverage, I don't think a lot of this is synthesized anywhere else yet
09.12.2024 14:27 — 👍 270 🔁 73 💬 9 📌 5
Authors: Giulio Turrisi, Lucas Schulze, Vivian S. Medeiros, Claudio Semini, Victor Barasuol
Paper: arxiv.org/pdf/2403.19862
24.11.2024 10:32 — 👍 1 🔁 0 💬 0 📌 0
(Other Twitter stuff)
Human-robot and robot-robot collaborative carrying with mobile robots typically requires a manipulator arm. At iros2024, we introduce PACC, a novel passive-arm design that, coupled with a decentralized MPC, allows an efficient execution of such tasks with quadruped robots.
24.11.2024 10:32 — 👍 13 🔁 1 💬 1 📌 0
(Posting old Twitter stuff for boosting connections/the algorithm)
Open-source (and in python!) MPC for quadruped robots. Gradient-based (via acados) or sampling-based in #JAX. Plus, multiple robots, multiple terrains, and multiple gaits!
Link: github.com/iit-DLSLab/Q...
21.11.2024 17:38 — 👍 39 🔁 6 💬 2 📌 0
Very nice extension!
19.11.2024 11:49 — 👍 0 🔁 0 💬 0 📌 0
Not yet, but we are working on it! If you discretize too much, the consensum mechanism will be slower to converge (and the will be more errors in the meantime). So yes, there is a sweet spot, but one can play a lot with the optimal subdivision here
17.11.2024 19:50 — 👍 1 🔁 0 💬 0 📌 0
Resercher in legged locomotion from italy here!
17.11.2024 11:20 — 👍 4 🔁 0 💬 1 📌 0
Title: Accelerating Model Predictive Control for Legged Robots through Distributed Optimization
Authors: Lorenzo Amatucci , Giulio Turrisi , Angelo Bratta , Victor Barasuol , Claudio Semini
Link to the paper: arxiv.org/pdf/2403.11742
Code: github.com/iit-DLSLab/D...
2/2
17.11.2024 11:17 — 👍 1 🔁 0 💬 1 📌 0
Model Predictive Control (MPC) for legged robots is limited by model complexity. In our recent IROS24 paper, we show how partitioning the robot into smaller subsystems, each controlled in parallel by a faster dedicated MPC, can achieve complex whole-body motions more efficiently.
1/2
17.11.2024 11:14 — 👍 18 🔁 2 💬 1 📌 0
precise motion that requires a lot of planning are still out of reach (e.g. cat agility!)
14.11.2024 21:08 — 👍 2 🔁 0 💬 1 📌 0
Machine learning
Google DeepMind
Paris
Professor of Computing, I do research on robotics and AI. I also ski.
https://robot-learning.cs.utah.edu/thermans
Senior Scientist @ Inria, France.
Head of Team Human Centered Robotics (HUCEBOT).
Humanoid robotics, robot learning, human-robot interaction. General Chair HUMANOIDS 2024.
Senior researcher at Inria. Robotics and AI.
Always fighting for the people.
Wife, Momala, Auntie. She/her.
107 Days, my behind-the-scenes account of the shortest campaign in history, is available now at https://kamalaharris.link/107Days.
90% reSKeets(?)
Locomotion modeling, simulation and control.
Ass. Prof. at University of Twente.
Biomechanics, neuromechanics, exos and all that good stuff.
Assistant professor | Neuromechanics of Walking | Human Movement Sciences | University Medical Center Groningen
UF BME Professor; Neuromechanist merging humans and machines (mobile EEG, bionic prostheses, robotic exoskeletons, virtual reality)
Interested in the mechanics, energetics and control of locomotion. Senior Lecturer at Edith Cowan University.
Assistant Professor @ UTwente | AI + Sensing for Space Biomechanics/Wearable Robotics | Dad
Biomechanist and roboticist. Postdoctoral researcher at TU Delft and Erasmus MC.
Stanford professor studying biomechanics, robotics, and design. I think a lot about how we design exoskeletons to improve human mobility. Also how we help students become good engineers. #Sci‘Sky. biomechatronics.stanford.edu
Biomechanics & Physiology of Human Locomotion • University of Texas at Austin Kinesiology • https://t.co/wveQjpKb8g
assistant professor at MIT building computational models to understand human movement
Wolfpack and Tar Heels. Prof in BME. Robotic prostheses and exoskeletons. Neural-machine interface. Mom of Two. Lab website https://nrel.bme.unc.edu
Editor-in-Chief of IEEE TNSRE https://www.embs.org/tnsre/
Opinions are mine
It’s Cool-uh-wine. Assistant prof @ FAU - EPFL, Cleveland State and TU Delft Alum - Biomechanics - Gait - Sports - Dutch National Lacrosse team 2011-2013 - she/her
Researcher, teacher, honorary PT. Mostly walking, balance, and stroke rehab.
Biomechanist studying mobility in infants with Down Syndrome
Postdoc at Boston University in the Infant Communication Lab
🎓 of BU Rehabilitation Sciences '23 and UPenn Enginering '17