Is there any activity here whatsoever?
*pinging for signs of life*
08.07.2025 06:38 — 👍 0 🔁 0 💬 0 📌 0
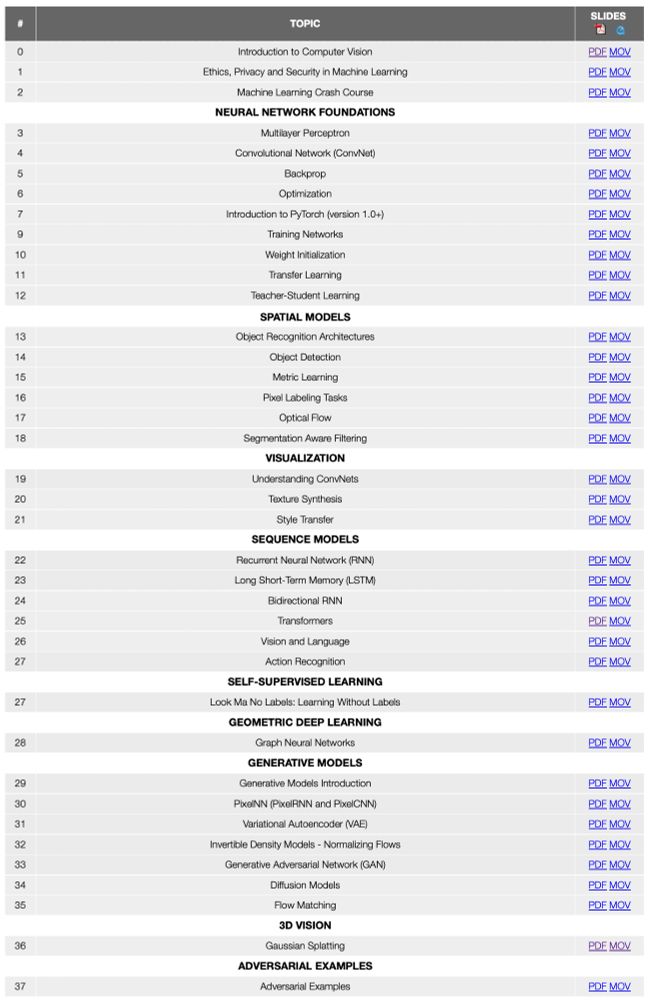

Lecture slides for my "Introduction to #ComputerVision" and "#DeepLearning in Computer Vision" courses.
🆕 Gaussian Splatting
🆕 Flow Matching
The included videos do not contain voiceovers yet, planned for a future revision.
03.07.2025 15:08 — 👍 30 🔁 5 💬 4 📌 0
 03.06.2025 14:40 — 👍 0 🔁 0 💬 1 📌 0
03.06.2025 14:40 — 👍 0 🔁 0 💬 1 📌 0

Relaxing Munich
10.05.2025 10:47 — 👍 0 🔁 0 💬 0 📌 0
"What you don't know may not hurt you, but what you don't remember always does."
01.05.2025 10:35 — 👍 0 🔁 0 💬 0 📌 0
👆🏻 RL agent angry about sparse rewards
30.04.2025 19:14 — 👍 0 🔁 0 💬 0 📌 0
 30.04.2025 19:13 — 👍 0 🔁 0 💬 1 📌 0
30.04.2025 19:13 — 👍 0 🔁 0 💬 1 📌 0
 25.04.2025 20:08 — 👍 1 🔁 0 💬 0 📌 0
25.04.2025 20:08 — 👍 1 🔁 0 💬 0 📌 0
 25.04.2025 05:56 — 👍 2 🔁 1 💬 0 📌 0
25.04.2025 05:56 — 👍 2 🔁 1 💬 0 📌 0
I just read "Welcome to the Era of Experience", advocating for agents grounded from interacting with the real world and getting their rewards from an "open-world" instead of simulation+simple reward.
I open bluesky
You propose agents working out for you. Someone is preparing for a grant 🤔
24.04.2025 20:25 — 👍 0 🔁 0 💬 0 📌 0
Swagger supports OpenAPI 3.1 since 19 Jun 2023 (at least that's the blog post date announcing it).
You think you can use the latest Swagger Editor for OpenAPI 3.1 on 22 April 2025, only 673 days later?
Nope, only if you pull tag `next-v5-unprivileged` ¿¡
22.04.2025 13:53 — 👍 0 🔁 0 💬 0 📌 0
1. LLM-generated code tries to run code from online software packages. Which is normal but
2. The packages don’t exist. Which would normally cause an error but
3. Nefarious people have made malware under the package names that LLMs make up most often. So
4. Now the LLM code points to malware.
12.04.2025 23:43 — 👍 7434 🔁 3380 💬 116 📌 425
06.04.2025 06:01 — 👍 851 🔁 83 💬 11 📌 1

Plan wisely.
05.04.2025 07:33 — 👍 0 🔁 0 💬 0 📌 0
 05.04.2025 06:47 — 👍 85 🔁 13 💬 1 📌 0
05.04.2025 06:47 — 👍 85 🔁 13 💬 1 📌 0
An extension could be for multi-agent systems, although way more complex to include the safety constraints (no collision)
04.04.2025 20:16 — 👍 3 🔁 0 💬 0 📌 0

This looks like a paper worth diving in
"We __prove__ that GNNs, trained to minimize a sparsity-regularized loss over a small set of shortest path instances, exactly implement the Bellman-Ford (BF) algorithm for shortest paths."
04.04.2025 20:16 — 👍 0 🔁 0 💬 1 📌 0
And a great blog post David wrote here: www.davidsilver.uk/wp-content/u...
04.04.2025 06:09 — 👍 0 🔁 0 💬 0 📌 0
...For every step Agent 1 makes, you reserve 2 cells in the shared table. For every step Agent 2 makes you reserve at least 1 cell.
04.04.2025 06:09 — 👍 0 🔁 0 💬 1 📌 0

What if some agents are slower/faster, how would the reservation table look like?
You discretize time based on their relative speed.
Imagine agent 1 4x as fast as agent 2. The shared table has cells of unit 1. Agent 1 table has cells of unit 2 and Agent 2 table cells of unit 0.5...
04.04.2025 06:09 — 👍 1 🔁 0 💬 1 📌 0

The idea is explained in this figure.
Agents reserve their shortest path in sequence, and a new Space-Time A* approach is used to find the shortest non-reserved path.
04.04.2025 06:09 — 👍 0 🔁 0 💬 1 📌 0
Let's go even further in the past to 2005 with David Silver's "Cooperative Pathfinding" paper
Yes, the same David Silver at DeepMind who led many of the breakthrough papers including AlphaGo and AlphaZero
04.04.2025 06:09 — 👍 1 🔁 0 💬 1 📌 0
At this point there are so many variants of CBS someone should write a review paper called "The CBS Family"
03.04.2025 20:46 — 👍 0 🔁 0 💬 1 📌 0
... 1 universe, agent 1 has to give way, and in another universe agent 2 has to give way. For each of those expansions, you search for all other collisions to resolve them. As soon as you expand possibilities and can't find a collision, you actually reached an optimal solution.
03.04.2025 20:46 — 👍 0 🔁 0 💬 1 📌 0
Simply put, you plan the shortest path for each of the agents then check for collisions. Collision is 2 agents reaching the same node at the same time, or crossing the same edge in opposite directions at the same time. For each collision you expand your "tree of possibilities" considering that in...
03.04.2025 20:46 — 👍 0 🔁 0 💬 1 📌 0
Assistant Professor at Ecole Polytechnique, IP_Paris// Before: Oxford_VGG, Inria Grenoble // multimodality, genAI enthusiast // happy mum+dog_mum // opinions: mine
AI & Transportation | MIT Associate Professor
Interests: AI for good, sociotechnical systems, machine learning, optimization, reinforcement learning, public policy, gov tech, open science.
Science is messy and beautiful.
http://www.wucathy.com
Formal methods, software history, chocolatiering. DMs open and happy to meet up in Chicago. Currently writing *Logic for Programmers* (out Q1 2026)
Newsletter: https://buttondown.email/hillelwayne/
Rust coder, creator of egui.rs, CTO of Rerun.io
ELLIS PhD Fellow @belongielab.org | @aicentre.dk | University of Copenhagen | @amsterdamnlp.bsky.social | @ellis.eu
Multi-modal ML | Alignment | Culture | Evaluations & Safety| AI & Society
Web: https://www.srishti.dev/
A programming language empowering everyone to build reliable and efficient software.
Website: https://rust-lang.org/
Blog: https://blog.rust-lang.org/
Mastodon: https://social.rust-lang.org/@rust
Professor, University Of Copenhagen 🇩🇰 PI @belongielab.org 🕵️♂️ Director @aicentre.dk 🤖 Board member @ellis.eu 🇪🇺 Formerly: Cornell, Google, UCSD
#ComputerVision #MachineLearning
Shopify / Royal Academy of Engineering Research Chair in Language Engineering. https://tratt.net/laurie/
Robotics/Perception Prof at Georgia Tech; Chief AI Officer at Verdant Robotics. Stints at Skydio, B*8, Reality Labs, Google Research. https://dellaert.github.io
#Python core developer who also works on packaging; works on Python stuff at #Microsoft (although this is a personal account). Proudly #Canadian.
IEEE Access is a multidisciplinary, open access journal covering all IEEE fields of interest. Its hallmarks are rapid, quality peer review, with a submission-to-publication time of 4 to 6 weeks. https://ieeeaccess.ieee.org/
Inventor & software engineer building Scour (https://scour.ing), a personalized content feed that scours noisy sources for articles related to your interests.
Blog and details at: https://emschwartz.me #rust #rustlang
Research scientist at Google Deepmind
generative modeling, rl, birds, poetry, games, robots
📍London 🔗 edouardleurent.com
Python, Boston, mathy fun, juggling, autism parenting. https://nedbat.com
AI x storytelling
AI Engineering: https://amazon.com/dp/1098166302
Designing ML Systems: http://amazon.com/dp/1098107969
@chipro
Sakana AI is an AI R&D company based in Tokyo, Japan. 🗼🧠
https://sakana.ai/careers