🏟️But we’re not done yet - our workshop continues at #ICCV2025! And the challenge moves forward too, with more prizes and exciting updates. opendrivelab.com/challenge2025/
13.07.2025 16:39 — 👍 3 🔁 2 💬 0 📌 0
📹Our #CVPR2025 workshop and tutorial recordings are now online! Big thanks to our incredible speakers! Watch all the sessions here
🔗 Workshop: youtube.com/playlist?lis...
🔗 Tutorial: youtube.com/playlist?lis...
13.07.2025 16:39 — 👍 5 🔁 1 💬 0 📌 2

#ICCV2025 DetAny3D: Detect Anything 3D in the Wild
Can your 3D detector handle novel objects & unseen cameras from just a single image? DetAny3D can.
📜 Paper: arxiv.org/abs/2504.07958
💻 Code: github.com/OpenDriveLab...
01.07.2025 16:33 — 👍 2 🔁 0 💬 0 📌 0

🚀The AgiBot World Challenge @ IROS2025 starts now! More details on opendrivelab.com/challenge202...
⏰ Key Dates
Online Challenge: June 25th to September 1st
Grand Finals: October 19th in Hangzhou
25.06.2025 13:30 — 👍 0 🔁 0 💬 0 📌 0

How can we reliably simulate future driving scenarios under a wide range of ego driving behaviors? Check out: ReSim: Reliable World Simulation for Autonomous Driving
resim-world-model.github.io
12.06.2025 07:08 — 👍 12 🔁 4 💬 0 📌 0
🤔 How to reliably simulate future driving scenarios under a wide range of ego behaviors?
😎 Key ingredient: Co-training the world model on heterogeneous data, including real-world data with expert actions and simulated data with non-expert behaviors.
See ReSim: arxiv.org/abs/2506.09981
12.06.2025 07:30 — 👍 2 🔁 2 💬 0 📌 0
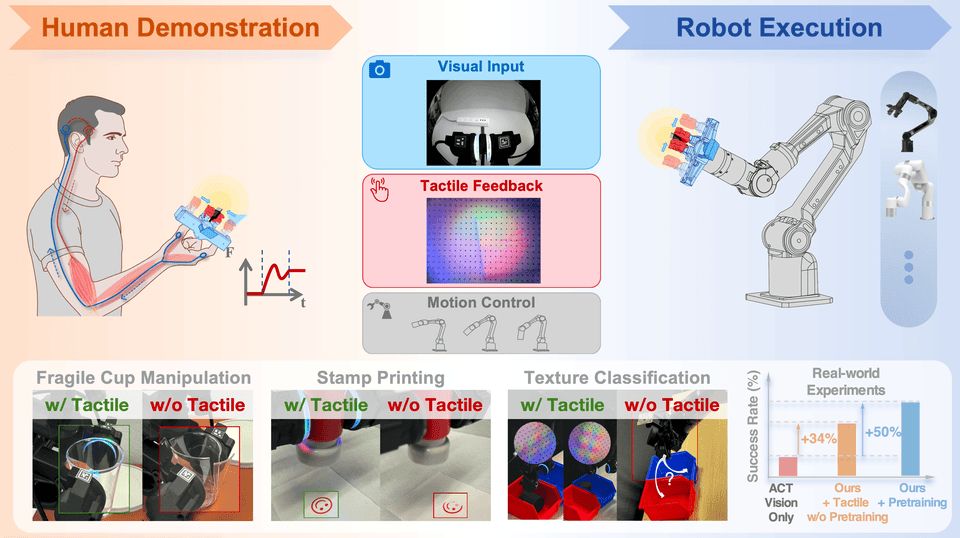
We are pleased to introduce FreeTacMan, a human-centric and robot-free visuo-tactile data collection system for high-quality and efficient robot manipulation!
🚀 Website: opendrivelab.com/FreeTacMan
📜 Paper: arxiv.org/abs/2506.01941
💻 Repo: github.com/OpenDriveLab...
04.06.2025 12:12 — 👍 3 🔁 1 💬 0 📌 0

🚀 Ready for the #IROS2025 challenge? We've got you covered!
🌍 Two identical sessions will run for different time zones. Don't miss it!
[Asia/Europe] 28 May 2025, 17:00 (UTC+8) us06web.zoom.us/j/88402705842
[America] 28 May 2025, 18:00 (UTC-7) us06web.zoom.us/j/86342172313
23.05.2025 13:12 — 👍 0 🔁 0 💬 0 📌 0

Forget slow autoregression and skip rigid full-sequence denoising! Nexus is a next-gen predictive pipeline for realistic, safety-critical driving scene generation.
Page: lnkd.in/gP4EuRFz
Paper: lnkd.in/gE7Svj-3
Repo: lnkd.in/gxuH959n
21.05.2025 13:26 — 👍 0 🔁 1 💬 0 📌 0
 09.05.2025 09:46 — 👍 1 🔁 2 💬 0 📌 0
09.05.2025 09:46 — 👍 1 🔁 2 💬 0 📌 0

🤖 Spoiler alert!
👀 At IROS 2025 in Hangzhou, robots will compete, live on stage.
🔗 Details will be released soon (very soon) on opendrivelab.com/challenge202...
02.05.2025 15:50 — 👍 4 🔁 1 💬 0 📌 0

⏰ The #CVPR2025 submission deadline is approaching fast — don't forget to upload your results by May 10th!
🤖 Coming in early May: The AgiBot World Challenge! We are going into the real world — deploying them on real robots, live at #IROS2025.
🔗 Learn more at opendrivelab.com/challenge2025
23.04.2025 17:40 — 👍 3 🔁 1 💬 0 📌 0


Introducing AgiBot World Colosseo:
A Large-scale Manipulation Platform for Scalable and Intelligent Embodied Systems. opendrivelab.com/blog/agibot-...
09.03.2025 14:06 — 👍 1 🔁 1 💬 0 📌 0

🌟 Previewing the UniAD 2.0
🚀 A milestone upgrade on the codebase of the #CVPR2023 best paper UniAD.
👉 Check out this branch github.com/OpenDriveLab..., and we will get you more details soon
05.03.2025 11:54 — 👍 9 🔁 3 💬 0 📌 0


🚀 This year, we’re bringing you three thrilling tracks in Embodied AI and Autonomous Driving, with a total prize pool of $100,000! Now get ready and join the competition!
Visit the challenge website: opendrivelab.com/challenge2025
And more on #CVPR2025: opendrivelab.com/cvpr2025
03.03.2025 11:44 — 👍 5 🔁 4 💬 0 📌 0


Remember the queue outside Room 442? Please mark the workshop in your CVPR registration to have enough space for all of you.
In CVPR 2025, our 3rd edition workshop will discuss the present and future of autonomous systems from a brand-new perspective. More on opendrivelab.com/cvpr2025/workshop/
23.01.2025 04:09 — 👍 3 🔁 1 💬 0 📌 1

🏟️ Okay, here we go with this year's challenges. In this 3rd edition of the Autonomous Grand Challenge, we have three tracks on Embodied AI and Autonomous Driving and a total cash pool of $100,000.
More information on opendrivelab.com/challenge2025/, and looking forward to your feedback!
23.01.2025 03:41 — 👍 4 🔁 2 💬 0 📌 1

🎇🎇 Wish you all a happy new year!
31.12.2024 16:00 — 👍 2 🔁 0 💬 0 📌 0

🤖 We are thrilled to announce AgiBot World, the first large-scale robotic learning dataset designed to advance multi-purpose humanoid policies!
Github:
github.com/OpenDriveLab...
HuggingFace:
huggingface.co/agibot-world
30.12.2024 10:48 — 👍 7 🔁 3 💬 0 📌 3
PhD student at OpenDriveLab, supervised by Prof. Hongyang Li.
AI for Robotics at @HuggingFace 🤗
Focusing on @LeRobotHF
Ph.D. student at HKU. Researcher on computer vision, autonomous driving and robotics (starter). Hobbyist on hiking, j-pop, scenery photography and anime.
kashyap7x.github.io
Postdoc at NVIDIA. Previously at the University of Tübingen and CMU. Robot Learning, Autonomous Driving.
Assistant Professor at The University of Hong Kong. #Robotics #Autonomous-Driving #Computer-Vision
Professor, University of Tübingen @unituebingen.bsky.social.
Head of Department of Computer Science 🎓.
Faculty, Tübingen AI Center 🇩🇪 @tuebingen-ai.bsky.social.
ELLIS Fellow, Founding Board Member 🇪🇺 @ellis.eu.
CV 📷, ML 🧠, Self-Driving 🚗, NLP 🖺
official Bluesky account (check username👆)
Bugs, feature requests, feedback: support@bsky.app