Feel free to check out the technical report playground.mujoco.org/assets/playg...
But most importantly, we welcome more contributors to try out Playground and to join the open-source sim ecosystem to push the frontier of robotics.
16.01.2025 23:12 — 👍 1 🔁 0 💬 1 📌 0
I also want to highlight hard work from collaborators to hook up MJX with the Madrona batch renderer (via github.com/shacklettbp/...).
I'm super impressed that Mustafa Haiderbhai and Jing Yuan Luo were able to train a pick-cube policy in 10 minutes from pixels on a 1x RTX 4090
16.01.2025 23:10 — 👍 0 🔁 0 💬 1 📌 0
As well as a non-prehensile high frequency torque control policy:
16.01.2025 23:07 — 👍 0 🔁 0 💬 1 📌 0
I'm particularly excited about the manipulation results, which used our MuJoCo MJX simulator to train dexterous manipulation policies:
16.01.2025 23:06 — 👍 0 🔁 0 💬 1 📌 0
Excited to announce playground.mujoco.org an open-source library for GPU-accelerated robot learning and sim-to-real transfer. With `pip install playground` you get access to a whole host of robotic learning environments, many of which were transferred onto robots!
16.01.2025 23:02 — 👍 3 🔁 1 💬 2 📌 0
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
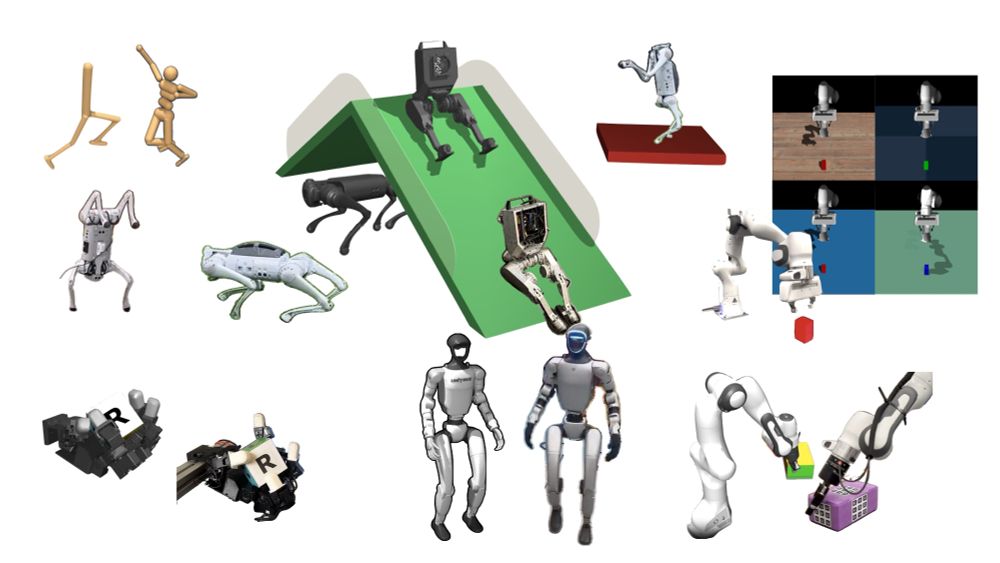
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
16.01.2025 20:48 — 👍 74 🔁 20 💬 1 📌 3
Excited to post a release this week about MuJoCo
13.01.2025 23:51 — 👍 0 🔁 0 💬 0 📌 0
Robots. Learning. Moving.
The swaying of a branch in the wind, a rotary gallop of a cheetah, sinusoidal commutation of a brushless motor, or that time I fell down the stairs; motion in all its forms fascinates me.
Currently RS intern @GoogleDeepMind, PhD Student in ML @Cambridge_Uni with @MihaelaVDS | Reinforcement Learning | LLMs | Continuous-time Control
An open-source physics simulator for articulated systems with contacts.
Maintained by Google DeepMind and the community. This is not an officially supported Google product.
DeepMind, MuJoCo. Love thy neighbor.
official Bluesky account (check username👆)
Bugs, feature requests, feedback: support@bsky.app











