
Hive (and all of its expansions) has been added to OpenSpiel! 🎉🤩🐝🐜🕷️🐞🦟🪲
From Gen42: "Hive is an award-winning board game with a difference. There is no board. The pieces are added to the playing area thus creating the board. As more and more pieces are added the game becomes a fight to ...
🧵1/5
28.04.2025 12:53 — 👍 14 🔁 3 💬 1 📌 2

Architecting a Multi-Agent System with Google A2A and ADK
How will you build AI systems with complex reasoning and distinct, specialized skills? Consider financial trading: success requires not…
Want to build AI agents on an architecture you can trust? Consider Google's ADK for self-contained agents, and A2A to connect your agents using an open protocol. Find out more:
📝 Blog post: medium.com/google-cloud...
⚙️ Code sample: github.com/kweinmeister...
🎬 Video: www.youtube.com/watch?v=EB-g...
21.04.2025 16:02 — 👍 9 🔁 6 💬 1 📌 0

Gemini Robotics
Our new Gemini Robotics model brings Gemini 2.0 to the physical world. It's our most advanced vision language action model, enabling robots that are interactive, dexterous, and general.
Learn more about how we're enabling the next generation of robotic AI agents at deepmind.google/robotics
12.03.2025 21:48 — 👍 8 🔁 2 💬 0 📌 0
This work wouldn’t have been possible without the most wonderful cast of collaborators from Berkeley, U. Toronto, Cambridge, Stanford and @deepmind.google.web.brid.gy.
16.01.2025 20:48 — 👍 2 🔁 0 💬 0 📌 0
playground.mujoco.org integrates high throughput batch rendering on GPU with Madrona-MJX. Using this, we trained a pixel-based block picking policy within minutes - achieving robust 100% success in real world trials.
16.01.2025 20:48 — 👍 2 🔁 0 💬 1 📌 0
With the Franka arm and playground.mujoco.org, we trained torque-controlled policies for contact-rich tasks like block reorientation. We obtain smooth, compliant and reactive behaviors running at 200Hz.
16.01.2025 20:48 — 👍 5 🔁 0 💬 1 📌 1
Locomotion is important, but what about the finer things in robotics? With playground.mujoco.org we took on the challenging task of dexterous in-hand reorientation with the open-source and low-cos LEAP hand. Our policy below was trained in 30 minutes on 2 4090s.
16.01.2025 20:48 — 👍 1 🔁 0 💬 1 📌 0
playground.mujoco.org allows humanoid robots to learn robust walking on different surfaces (below: Berkeley Humanoid, see other humanoid robots on the website).
16.01.2025 20:48 — 👍 3 🔁 0 💬 1 📌 0
playground.mujoco.org makes training locomotion policies straightforward and fast:
Quadrupeds like Go1: joystick control, fall recovery, handstands and footstands trained in minutes.
16.01.2025 20:48 — 👍 3 🔁 0 💬 1 📌 0
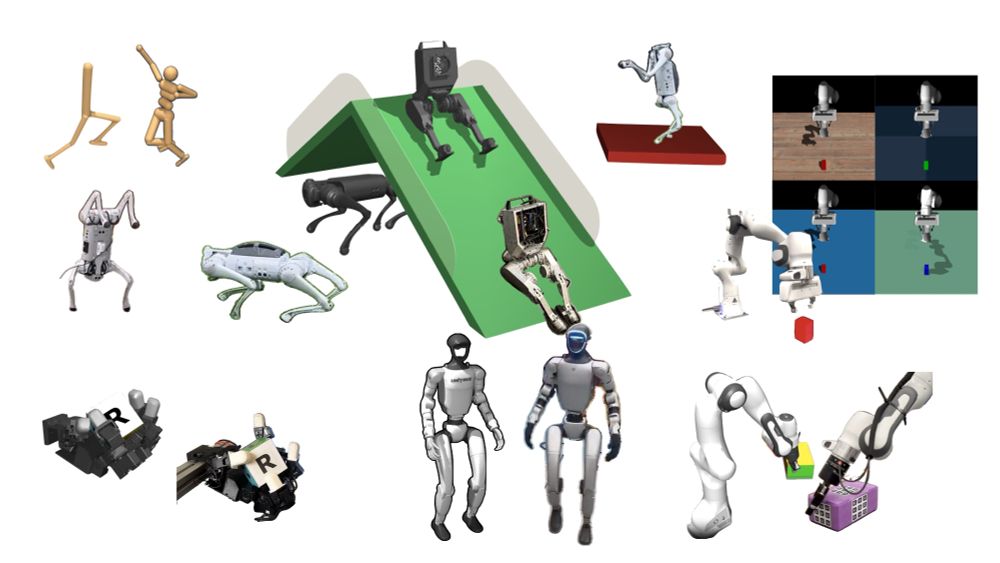
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
The key to fast progress in robotics? Rapid iteration loops.
playground.mujoco.org streamlines the entire process from simulation to deployment and back.
In just 8 weeks, this unlocked:
- Zero-shot transfer across 5 robots.
- Locomotion, manipulation, and vision-based control.
16.01.2025 20:48 — 👍 1 🔁 0 💬 1 📌 0
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
16.01.2025 20:48 — 👍 74 🔁 20 💬 1 📌 3
Google Chief Scientist, Gemini Lead. Opinions stated here are my own, not those of Google. Gemini, TensorFlow, MapReduce, Bigtable, Spanner, ML things, ...
DeepMind, MuJoCo. Love thy neighbor.
Roboticist trained in Padova and Genoa.
Currently working in London, dreaming to sail worldwide.
iron76.github.io
Associate Professor in EECS at MIT. Neural nets, generative models, representation learning, computer vision, robotics, cog sci, AI.
https://web.mit.edu/phillipi/
NeuroAI PhD Candidate at McGill / Mila.
Loves: 🧠 🏕️ 🏔️ 🏊🏻♂️ 🚴🏻♂️ 🏃🏻♂️ 🎨📚☕
https://raymondchua.github.io
Assistant Prof at @UMontreal @mila-quebec.bsky.social @MontrealRobots
. CIFAR AI Chair, RL_Conference chair. Creating generalist problem-solving agents for the real world. He/him/il.
PhD student at the University of Pennsylvania. Prev, intern at MSR, and Meta FAIR. Interested in reliable and replicable reinforcement learning, robotics and knowledge discovery: https://marcelhussing.github.io/
All posts are my own.
PhD student UC Berkeley AI | MIT '20
shreyaskapur.com
Research Scientist at Google DeepMind, interested in multiagent reinforcement learning, game theory, games, and search/planning.
Lover of Linux 🐧, coffee ☕, and retro gaming. Big fan of open-source. #gohabsgo 🇨🇦
For more info: https://linktr.ee/sharky6000
Cofounded and lead PyTorch at Meta. Also dabble in robotics at NYU.
AI is delicious when it is accessible and open-source.
http://soumith.ch
official Bluesky account (check username👆)
Bugs, feature requests, feedback: support@bsky.app

















