Tired Europe: Let's do tons of AI regulations
Wired Europe: Let's do tons of AI open source
#aiPULSE2025
05.12.2025 20:00 — 👍 10 🔁 1 💬 0 📌 0

This essay, roughly on dual use, has been haunting me for a while now:
dl.acm.org/doi/pdf/10.1...
03.12.2025 08:06 — 👍 28 🔁 4 💬 3 📌 0
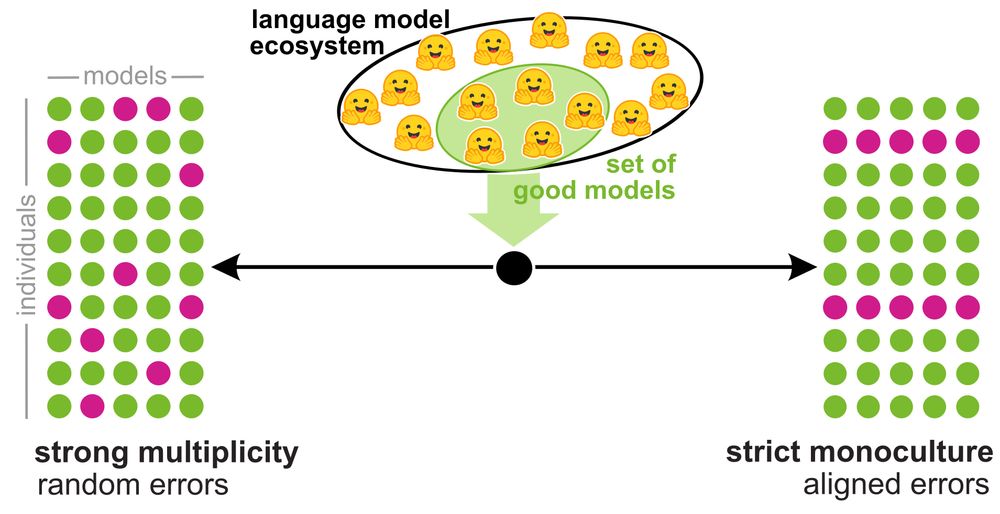
Excited to be at #Neurips2025 this week to present our paper "Monoculture or Multiplicity: Which is it?", joint work with Moritz Hardt.
📄 Paper #1000: openreview.net/pdf?id=DO5Lt...
📍 Wed, Dec 3, 2025 • 4:30 PM – 7:30 PM
Feel free to come by and reach out!
A short 🧵.
02.12.2025 15:55 — 👍 15 🔁 4 💬 1 📌 0

Attending #Neurips2025? Get your personalized Scholar Inbox conference program now to easily navigate the poster sessions and find what you are looking for:
www.scholar-inbox.com/conference/n...
02.12.2025 06:37 — 👍 32 🔁 12 💬 0 📌 0
Scholar Inbox for NeurIPS is live now.
01.12.2025 19:44 — 👍 14 🔁 5 💬 0 📌 2

Preprint site arXiv is banning computer-science reviews: here’s why
The repository is taking steps to tackle a surge in low quality, AI-generated content.
www.nature.com/articles/d41...
ArXiv banned surveys due to AI slop spam.
Now we need to wait for them to be peer-reviewed.
Bad development, we need to find better solutions to AI slop than banning unreviewed papers.
Getting a survey reviewed at a good journal can take over a year. :(
01.12.2025 14:36 — 👍 0 🔁 0 💬 0 📌 0
Quick reminder about the EPFL PhD program deadline (EDIC) on Dec 15.
27.11.2025 10:14 — 👍 4 🔁 2 💬 0 📌 0
no this work focusses on IL.
I would personally be interested whether RL models habe similar failures but it is much harder to do this type of analysis when the model predicts actions not waypoints. (Can't do it offline anymore)
26.11.2025 11:18 — 👍 0 🔁 0 💬 0 📌 0
🚀 Introducing TMLR Beyond PDF!
🎬 This is a new, HTML-based submission format for TMLR, that supports interactive figures and videos, along with the usual LaTeX and images.
🎉 Thanks to TMLR Editors in Chief: Hugo Larochelle, @gautamkamath.com, Naila Murray, Nihar B. Shah, and Laurent Charlin!
25.11.2025 16:11 — 👍 74 🔁 22 💬 1 📌 3
Congratulations to @cworthy.org on their announcement today!
Learn more about this wonderful FRO here: www.youtube.com/watch?v=DA-e...
24.11.2025 19:23 — 👍 4 🔁 1 💬 0 📌 0
Apply - Interfolio
{{$ctrl.$state.data.pageTitle}} - Apply - Interfolio
Come be our colleague in the robotics and embodied intelligence center at NYU!
🔷 Professor in Robotics / Embodied AI (Open Rank)
apply.interfolio.com/176977
🔷 Faculty Fellow in Robotics / Embodied AI
apply.interfolio.com/177077
18.11.2025 20:01 — 👍 20 🔁 6 💬 1 📌 0
ICBINB - Crack open the research process
I think research that hits dead ends is not the useless research people are talking about.
there is great work that hit dead ends:
icbinb.cc
16.11.2025 20:11 — 👍 0 🔁 0 💬 0 📌 0
publication has a cost, wastes other peoples time to read, verify.
Also, only works in small science fields.
In ML your reputation outside your core community is your google scholar.
Know several people I would never hire but have compelling profiles. people don't call out sloppy work publicly.
16.11.2025 19:51 — 👍 2 🔁 0 💬 0 📌 0

🚀 New paper: ConeGS Error-Guided Densification Using Pixel Cones. We improve 3D Gaussian Splatting by placing Gaussians where they matter most: ConeGS adds primitives along pixel-view cones guided by image error, boosting quality with fewer Gaussians. baranowskibrt.github.io/conegs/
12.11.2025 10:50 — 👍 14 🔁 3 💬 0 📌 1

New SOTA in imitation learning (IL) for planning in CARLA, and an in-depth analysis of all the overfitting that is going on with IL policies.
arxiv.org/abs/2511.07292
11.11.2025 13:56 — 👍 6 🔁 1 💬 1 📌 0

GitHub - autonomousvision/Bench2Drive-Leaderboard: Bench2Drive Leaderboard
Bench2Drive Leaderboard. Contribute to autonomousvision/Bench2Drive-Leaderboard development by creating an account on GitHub.
Bench2Drive has become a popular autonomous driving benchmark with over 40 methods. Papers only report a few baselines due to space constraints, making it hard to keep an overview. To fix this, we made a leaderboard that contains every published result:
github.com/autonomousvi...
10.11.2025 19:18 — 👍 7 🔁 1 💬 0 📌 0

📣 JobAlert:
12 days left, hit the Apply button now:
Join Tübingen AI Center as a Scientific Project Coordinator for OpenEuroLLM - support, building a series of open-source foundation models for transparent AI in Europe!
👉 lnkd.in/eTptRaFy
📅 Deadline: November 19, 2025
@unituebingen.bsky.social
07.11.2025 14:15 — 👍 2 🔁 2 💬 0 📌 0
Personally I would not want to be in the camp of arguing that we simply *must* have 40k vehicular deaths a year. Status quo bias is an insane drug
07.11.2025 15:14 — 👍 44 🔁 1 💬 3 📌 0

Here is a formal impossibility result for XAI: Informative Post-Hoc Explanations Only Exist for Simple Functions. I'll give an online presentation about this work next tuesday in @timvanerven.nl 's Theory of Interpretable AI Seminar:
arxiv.org/abs/2508.11441
tverven.github.io/tiai-seminar/
07.11.2025 06:24 — 👍 15 🔁 5 💬 0 📌 0
Launching the Physical AI AV Dataset! 🚀
huggingface.co/datasets/nvi...
One of the largest, most diverse & commercially usable open-source datasets for AVs.
- 1727 hours of driving data
- Camera, LiDAR, & radar
- 25 countries, 2500+ cities
This is just the beginning, more features to come!
28.10.2025 17:59 — 👍 28 🔁 7 💬 0 📌 0
Qualitative difference in data quality. OpenDV are youtube dash cams. This is data from real self-driving vehicle sensor stacks.
This should be around 10x the size of prior biggest dataset (the nuPlan split that has sensor data).
28.10.2025 21:51 — 👍 3 🔁 0 💬 1 📌 0
Strange, that is a bug in the bluesky preview. The blue link I posted works perfectly fine.
28.10.2025 19:48 — 👍 1 🔁 0 💬 0 📌 0
Big day for autonomous driving research.
Nvidia just dropped 1700 hours of public driving data on HuggingFace from over 2500 cities:
huggingface.co/datasets/nvi...
28.10.2025 18:03 — 👍 16 🔁 3 💬 1 📌 1
interesting, didn't know that. is there any documentation / paper about how they are using rt-cores for physics acceleration?
28.10.2025 11:04 — 👍 2 🔁 0 💬 1 📌 0
not sure if still up to date, but there used to be an exception for universities from the no geforce in clusters rule. we have an old 2080ti cluster.
(wouldn't recommend though they break often. rtx should be the better choice nowadays).
27.10.2025 21:04 — 👍 0 🔁 0 💬 0 📌 0
uses raytracing for rendering which requires raytracing cores which these gpus don't have.
Still bad engineering should have the option to run without rendering on A100.
27.10.2025 21:00 — 👍 2 🔁 0 💬 1 📌 0
Some chinese folks I talked to mentioned that the local governments are in a fierce competition about who can invest the most money in AI.
27.10.2025 01:34 — 👍 0 🔁 0 💬 0 📌 0

Takeru Miyato - AI Research Scientist
PhD student at University of Tübingen working on artificial intelligence, machine learning, and deep learning research.
Congratulations to our PhD student @takerumiyato.bsky.social for winning the Google PhD Fellowship in the category "Machine Learning and ML Foundations". Takeru is pioneering new neural architectures that improve generalization and efficiency. Check out his research: takerum.github.io
24.10.2025 07:37 — 👍 29 🔁 3 💬 0 📌 1
h-index is definetly broken but this is making it worse not better.
26.10.2025 02:44 — 👍 2 🔁 0 💬 0 📌 0
I now understand the position of the YOLO author a lot better than I did before
23.10.2025 15:00 — 👍 10 🔁 1 💬 1 📌 0
Ph.D student at the Max Planck Institute for Intelligent Systems. Forest child.
https://sbharadwajj.github.io/
PhD student at NYU | Building human-like agents | https://www.daphne-cornelisse.com/
Mentor, scientist & engineer. Having fun in @slavovlab.bsky.social and Parallel Squared Technology Institute @parallelsq.bsky.social with biology & single-cell proteomics.
https://nikolai.slavovlab.net
A nonprofit research institute for advancing protein research in human health and disease | parallelsq.org
🔍3D Vision
https://bianwenjing.github.io/
Researcher on MDPs and RL. Retired prof. #orms #rl
Research Scientist at valeo.ai | Teaching at Polytechnique, ENS | Alumni at Mines Paris, Inria, ENS | AI for Autonomous Driving, Computer Vision, Machine Learning | Robotics amateur
⚲ Paris, France 🔗 abursuc.github.io
PhD student @ AVG, University of Tübingen
WirStiftenWissen – auch hier auf BlueSky. Folgt uns für spannende Förderangebote, mutige Forschungsprojekte und faszinierende Veranstaltungen.
🌐 www.volkswagenstiftung.de
Human /
Quaker (Co-clerk of Switzerland YM & Executive Committee at QCEA) /
Zen- and NVC-practitioner /
Robotics & Computer Vision Researcher /
Anarchist / Activist /
OpenSource-, mountaineering-, and music-enthusiast
https://andreasaziegler.github.io
A mission control for frontier technology.
To learn more about FROs, visit convergentresearch.org.
RL & Agents Reading Group @ University of Edinburgh
We regularly discuss recent papers in RL, MARL & related
https://edinburgh-rl.github.io/reading-group
Assistant Professor @ ZJU
computer vision
https://yiyiliao.github.io/
Machine learning scientist at Mercedes-Benz
Previously PhD student at Mercedes-Benz and
@tuebingen-ai.bsky.social @unituebingen.bsky.social
AI, robotics, and other stuff. Currently AI @ agility robotics
Former Hello Robot, NVIDIA, Meta.
Writing about robots https://itcanthink.substack.com/
All opinions my own
This is the official account of EWRL18 - European Workshop on Reinforcement Learning
Official website: https://euro-workshop-on-reinforcement-learning.github.io/ewrl18/
Professor for Machine Learning, University of Tübingen, Germany
PhD student in ML at Tübingen AI Center & International Max-Planck Research School for Intelligent Systems
Co-founder & Chief Scientist at Yutori. Prev: Senior Director leading FAIR Embodied AI at Meta, and Professor at Georgia Tech.