With only a few seconds of data, the resulting geometry and dynamics predictions are more accurate that vision-only methods, including deep shape reconstruction. Videos on the website, and details in the paper.
arxiv.org/abs/2504.18719
29.04.2025 15:37 — 👍 2 🔁 0 💬 0 📌 0
This paper, led by Bibit Bianchini and Minghan Zhu, has been a labor of love, and we're excited to share it at @roboticsscisys.bsky.social RSS 2025.
We combine BundleSDF (Vision) with our prior work on contact-rich learning (PLL), where each component feeds back useful insights to the others.
29.04.2025 15:37 — 👍 2 🔁 0 💬 1 📌 0
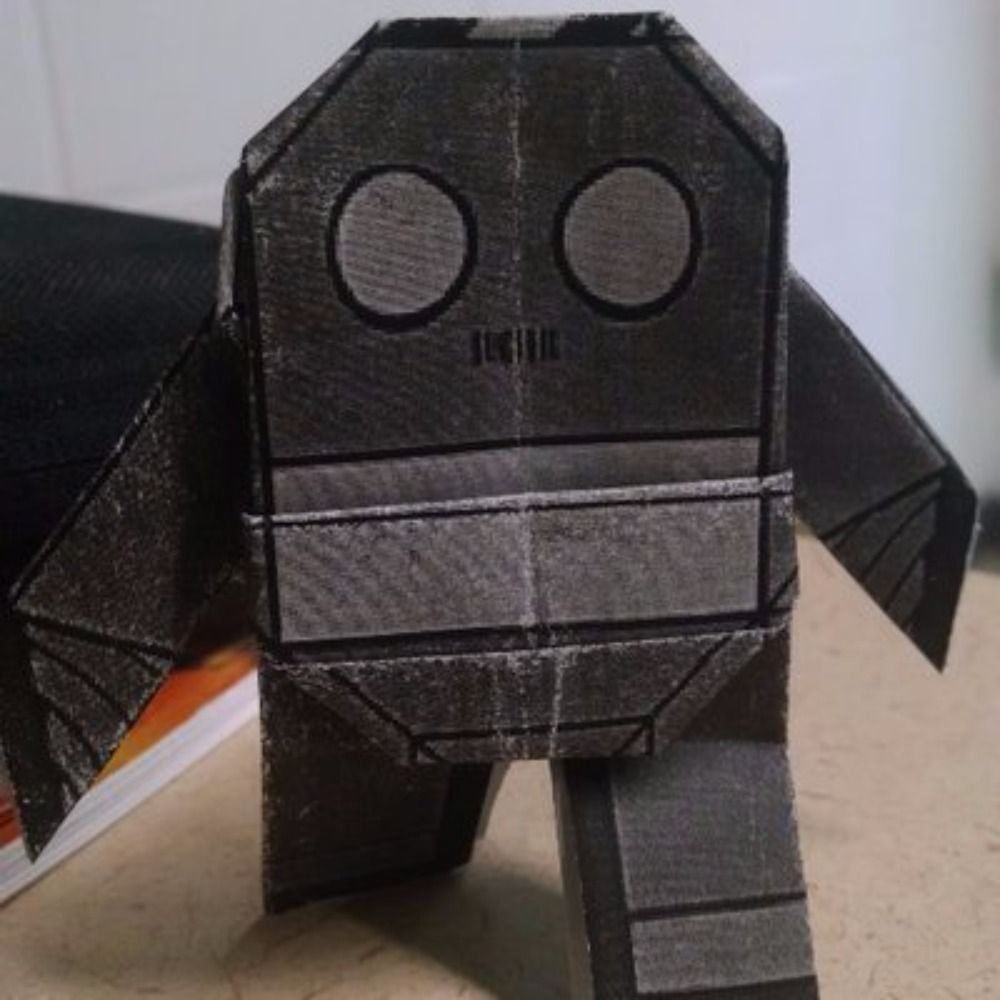
Vision and contact dynamics are both heavily influenced by geometry, so why do we treat them as separate problems? By combining vision with physics, "Vysics," each informs the other and we generate accurate shape reconstructions despite major visual occlusions.
vysics-vision-and-physics.github.io
29.04.2025 15:37 — 👍 6 🔁 0 💬 1 📌 0
2024 Best Paper Award Finalists and Winner - IEEE RAS TC on Model-based Optimization for Robotics
Congratulations to Dr. Michael Posa @michaelposa.bsky.social on receiving the 2024 Best Paper Award at the IEEE RAS TC on Model-based Optimization for Robotics!
More info here!
www.tcoptrob.org/news/2025-04...
#GRASP #GRASPLab #BestPaperAward #IEEE2024
22.04.2025 18:48 — 👍 7 🔁 2 💬 0 📌 0

Doctoral Programs
I'm recruiting multiple Ph.D. students across all departments (ME, EE, or CS). Growing research projects focus on dexterous manipulation in novel settings, combining control and learning with visuotactile sensing and non-smooth dynamics.
Deadline December 16
gradadm.seas.upenn.edu/doctoral/
26.11.2024 02:32 — 👍 8 🔁 0 💬 0 📌 0
If Adolf Hitler flew in today, they’d send a limousine anyway. Parody. Merch: https://tinyurl.com/msjjmwpt
The IEEE Transactions on Robotics (T-RO) publishes major advances in the state-of-the-art in all areas of robotics including theory, design, experimental studies, analysis, algorithms, and integration and application case studies.
Assistant Professor Stanford CS. Perception, learning and control for autonomous robotic manipulation. https://web.stanford.edu/~bohg/
90% reSKeets(?)
Locomotion modeling, simulation and control.
Senior Lecturer, Electrical and Computer Engineering, University of Sydney | Lab https://ialab.yale.edu/
Professor of Computing, I do research on robotics and AI. I also ski.
https://robot-learning.cs.utah.edu/thermans
Economics editor at The Bulwark. MS NOW (formerly MSNBC) anchor.
Previously WaPo op-ed columnist and NYT reporter.
Econ, politics, immigration, tax, etc. + occasional theater nerdery.
Multi-Platform Robotic Autonomy | 3D Geospatial Mapping | AI Startup Company based in Philadelphia
The latest technology news and analysis from the world's leading engineering magazine.
Assistant Prof. at Georgia Tech | NVIDIA AI | Making robots smarter
DeepMind, MuJoCo. Love thy neighbor.
Associate Professor at #MIT, SPARK Lab Director, Roboticist, interested in how machines see and understand the world
lucacarlone.mit.edu
Robotics: Science and Systems Conference #robotics #research
roboticsconference.org
Amanda Katz said this was the cool kids table.
independent writer of citationneeded.news and @web3isgoinggreat.com • tech researcher and cryptocurrency industry critic • software engineer • wikipedian
support my work: citationneeded.news/signup
links: mollywhite.net/linktree
💗💜💙
#RobotLearning Professor (#MachineLearning #Robotics) at @ias-tudarmstadt.bsky.social of
@tuda.bsky.social @dfki.bsky.social @hessianai.bsky.social
Foundation Models for Generalizable Autonomy.
Assistant Professor in AI Robotics, Georgia Tech
prev Berkeley, Stanford, Toronto, Nvidia
From SLAM to Spatial AI; Professor of Robot Vision, Imperial College London; Director of the Dyson Robotics Lab; Co-Founder of Slamcore. FREng, FRS.
Associate Professor at Northeastern University and father of 3. Interests include artificial intelligence, reinforcement learning, and robotics (he/him).