Cool! I love your blenderproc code!
10.12.2024 18:50 — 👍 1 🔁 0 💬 0 📌 0

🚀 How well does it work?
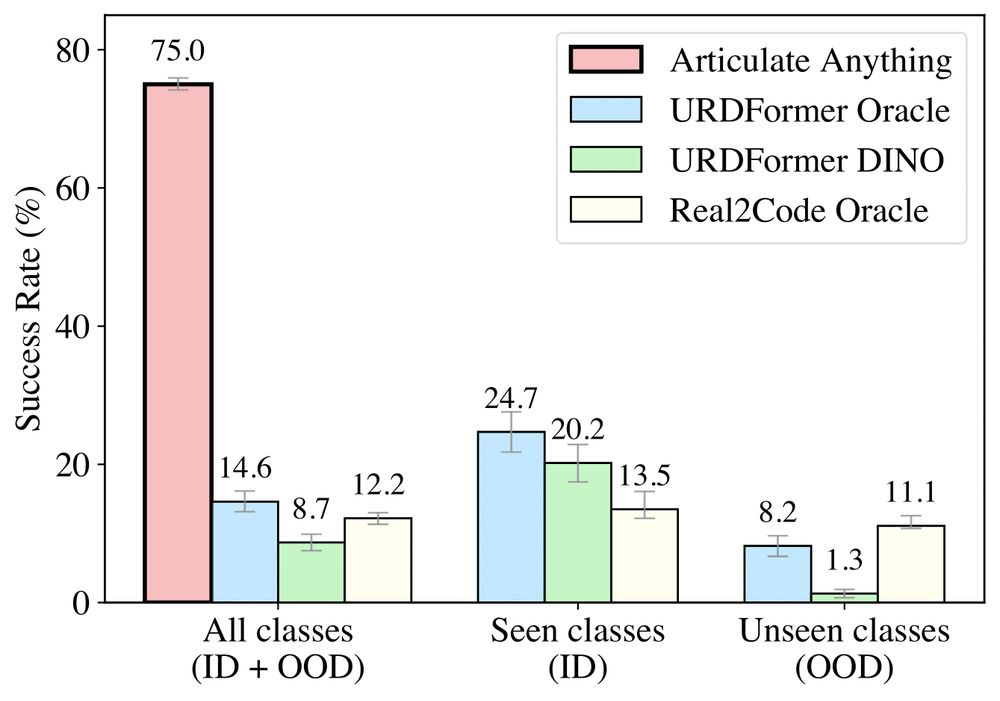
Articulate-Anything is much better than the baselines both quantitatively and qualitatively. This is possible due to (1) leveraging richer input modalities, (2) modeling articulation as a high-level program synthesis, (3) leveraging a closed-loop actor-critic system
10.12.2024 16:44 — 👍 0 🔁 0 💬 0 📌 0
🧩How does it work?
Articulate-Anything breaks the problem into three steps: (1) Mesh retrieval, (2) Link placement, which spatially arranges the parts together, and (3) Joint prediction, which determines the kinematic movement between parts. Take a look at a video explaining this pipeline!
10.12.2024 16:44 — 👍 0 🔁 0 💬 1 📌 0
🙀Why does this matter?
Creating interactable 3D models of the world is hard. An artist have to model the physical appearance of the object to create a mesh. Then a roboticist needs to manually annotate the kinematic joints to give object movement in URDF.
But what we can automate all these steps?
10.12.2024 16:44 — 👍 1 🔁 0 💬 1 📌 0
📦 Can frontier AI transform ANY physical object from ANY input modality into a high-quality digital twin that also MOVES?
Excited to share our work,Articulate-Anything 🐵, exploring how VLMs can bridge the gap between the physical and digital worlds.
Website: articulate-anything.github.io
10.12.2024 16:44 — 👍 4 🔁 1 💬 1 📌 0
Hello, can I be added please 🙏? I work on robot/reinforcement learning and we have a cool sim2real RL paper in submission!
14.11.2024 15:55 — 👍 0 🔁 0 💬 0 📌 0
Hello! Can I be added please 🙏? I work on 3d vision for robot learning
14.11.2024 15:12 — 👍 1 🔁 0 💬 1 📌 0
Principal research scientist at Google DeepMind. Synthesized views are my own.
📍SF Bay Area 🔗 http://jonbarron.info
This feed is a mostly-incomplete mirror of https://x.com/jon_barron, I recommend you just follow me there.
PhD student at TU Munich
Researcher with the German Aerospace Center (DLR)
Visualization Aficionado
Blog: hummat.com
research @ Google DeepMind
Ph.D. in Neuroimaging | AI/Computer Vision Researcher | Making training and inference more efficient | 🇲🇫 CTO & Startup Founder | Linux Aficionado
PhD @ MICAS, KU Leuven 🇧🇪 | Neuromorphic hardware for edge AI | Elec. Eng. grad (ULiège), neuromorphic focus.
#RobotLearning Professor (#MachineLearning #Robotics) at @ias-tudarmstadt.bsky.social of
@tuda.bsky.social @dfki.bsky.social @hessianai.bsky.social
Ex-SWE @ Google Life Science // Radiology Resident @ UPenn // researching self supervision for radiology AI
Principal Research Scientist in Computer Vision at Naver Labs Europe
https://philippeweinzaepfel.github.io/
PhD candidate @ The Ohio State University
autonomous systems | edge computing | robotics | animal ecology
I build autonomous aerial systems for ecology missions. 🚁🦓
https://jennamk14.github.io/
Robotics PhD Student ◆ Animal Lover ◆ Curious Person
Predictive dynamics of hexapod robots in granular media research is underway
Exploring frontiers of AI and its applications to science/engineering
Formerly: PhD/postdoc in Berkeley AI Research Lab + UC Berkeley Computational Imaging Lab
https://henrypinkard.github.io/
Computer Vision Laboratory @ Kyoto University (Ko Nishino, Ken Sakurada, Ryo Kawahara)
https://vision.ist.i.kyoto-u.ac.jp/
ML for drug discovery, protein dynamics, medical image analysis, PhD, Max-Delbrück Center Berlin
M.Sc. @ ETH Zurich, 👀 for Ph.D. opportunities
3D vision, neural rendering, and 3D reconstruction
📍Zurich, Switzerland
Research Fellow @ York. Using Computer Vision to improve film and tv production. Interested in 3D body models, video for 3D, and inverse rendering.
Defence, 3D computer vision, EW, GNSS, open source and C++. #NAFO
R&D Lead Engineer at Milrem Robotics.
github.com/valgur
Currently studying Masters in Human centered AI in Technical university of Denmark, interested in 3D vision and Vision Language Models
Previously bachelor student in Lund university
PhD student @stanfordnlp.bsky.social. Robotics Intern at the Toyota Research Institute. I like language, robots, and people.
On the academic job market!
PhD candidate @ ETH Zurich & Max Planck Institute for Informatics
From SLAM to Spatial AI; Professor of Robot Vision, Imperial College London; Director of the Dyson Robotics Lab; Co-Founder of Slamcore. FREng, FRS.