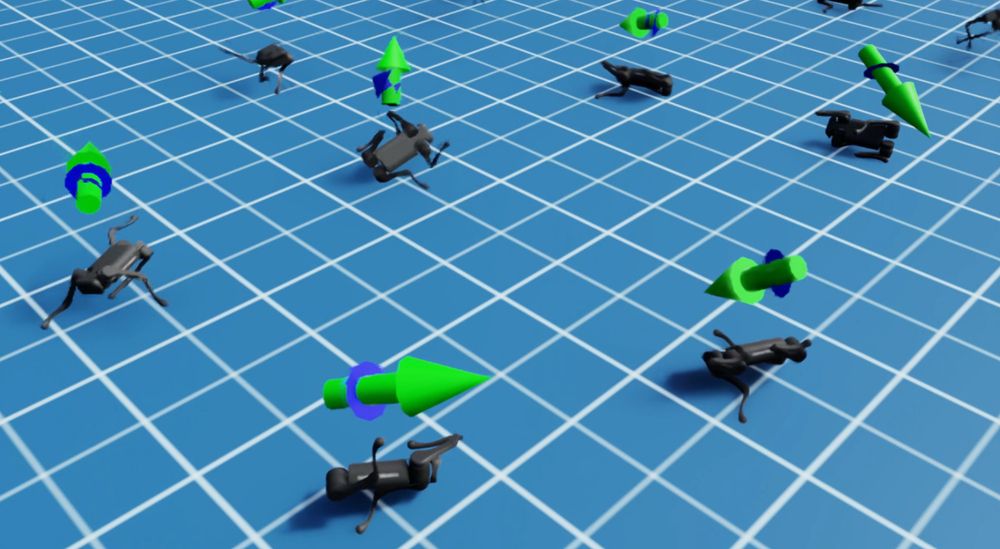
Arrived at IROS 2025 to present our work - Interactive incremental learning of generalizable skills with local trajectory modulation. 🦾
Feel free to pass by to see my talk and chat with me at my poster. 💬
Robotic Imitation Learning 4
🗓️ Wed, Oct 22· 5:10PM
📍 Room 311 B
Link to paper in comments.
20.10.2025 06:39 — 👍 1 🔁 0 💬 1 📌 0
10th International Workshop on Recovering 6D Object Pose (R6D)
Got some recent research related to 6D Object Pose Estimation? Want to present it at #ICCV2025 in Hawaii? 🌴
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)
23.05.2025 12:34 — 👍 10 🔁 6 💬 1 📌 0


Checkout our paper at #ICRA2025 in Atlanta 🇺🇸
How can robotic systems articulate truthful answers about their internal knowledge in natural language? 🤖
📅 Presentation: May 20th, 2025, at 16:45 EDT in Room A314
📍 Poster session: Immediately following the talks
19.05.2025 14:33 — 👍 2 🔁 0 💬 1 📌 0
Queer in Robotics
Purpose
Hello, Bluesky! 🌈🤖 Thrilled to introduce Queer in Robotics! We're building a welcoming, safe space for queer roboticists and shining a light on queer issues in robotics. Join us! 💫
sites.google.com/view/queerin...
19.11.2024 15:12 — 👍 7 🔁 4 💬 1 📌 0
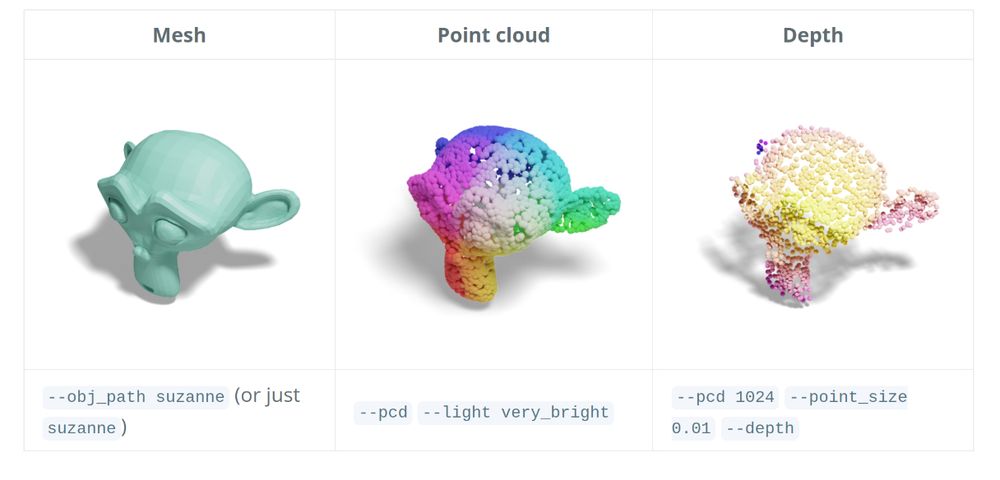
A screenshot of output from the blenderproc tool, with associated options. Left: Mesh Middle: Point Cloud Right: Depth
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
09.12.2024 10:11 — 👍 43 🔁 8 💬 2 📌 1
🚀 Exciting news! Our work has been published in IEEE 𝘙𝘰𝘣𝘰𝘵𝘪𝘤𝘴 𝘢𝘯𝘥 𝘈𝘶𝘵𝘰𝘮𝘢𝘵𝘪𝘰𝘯 𝘓𝘦𝘵𝘵𝘦𝘳𝘴 (𝘙𝘈-𝘓). 🌟
📄 𝗧𝗶𝘁𝗹𝗲: 𝘐𝘯𝘵𝘦𝘳𝘢𝘤𝘵𝘪𝘷𝘦 𝘪𝘯𝘤𝘳𝘦𝘮𝘦𝘯𝘵𝘢𝘭 𝘭𝘦𝘢𝘳𝘯𝘪𝘯𝘨 𝘰𝘧 𝘨𝘦𝘯𝘦𝘳𝘢𝘭𝘪𝘻𝘢𝘣𝘭𝘦 𝘴𝘬𝘪𝘭𝘭𝘴 𝘸𝘪𝘵𝘩 𝘭𝘰𝘤𝘢𝘭 𝘵𝘳𝘢𝘫𝘦𝘤𝘵𝘰𝘳𝘺 𝘮𝘰𝘥𝘶𝘭𝘢𝘵𝘪𝘰𝘯
Links in comments.
#robotics #research #interactiveLearning #imitationLearning #machineLearning #IEEE
07.03.2025 09:51 — 👍 3 🔁 1 💬 1 📌 0
Paper: elib.dlr.de/205203/1/Bus...
Workshop Website: sites.google.com/view/gai-hri...
30.01.2025 14:13 — 👍 0 🔁 0 💬 0 📌 0
Computational Statistics and Machine Learning (CSML) Lab | PI: Massimiliano Pontil | Webpage: csml.iit.it | Active research lines: Learning theory, ML for dynamical systems, ML for science, and optimization.
He/him🌈 Assistant professor of robotics at Universitat Politècnica de Catalunya (UPC). Interested in topics lying at the intersection between applied mathematics, artificial intelligence, and robotics. Geometric algebra in engineering and computer science.
PhD candidate - Centre for Cognitive Science at TU Darmstadt,
explanations for AI, sequential decision-making, problem solving
ML PhD Student @ TU Graz
Interested in Diffusion/Flows, Tractable Models and Neurosymbolic Learning
Anthropologist from UniCPH and MS student in Machine Learning at Techincal University of Denmark. Apart from uncertainty in modelling, I care a lot about regenerative farming and food.
You can also find me here: https://www.linkedin.com/in/simoneiriksson
Prof at TU Nuremberg, PI at Helmholtz AI, Fellow at Zuse School for reliable AI, Branco Weiss Fellow, ELLIS Scholar.
Prev: TUM, Cambridge CBL, St John's College, ETH Zürich, Google Brain, Microsoft Research, Disney Research.
https://fortuin.github.io/
Our publications, research, and higher education solutions spread knowledge, spark curiosity and aid understanding around the world.
View our social media commenting policy here: https://cup.org/38e0Gv2
Incoming assistant professor, Cornell CS (Fall 2025). Control, perception, and learning for dynamic robots.
Entertaining & educational conversations about science, tech, + more. Hosted by Ira Flatow and Flora Lichtman. From WNYCStudios.
🏳️🌈 NVIDIA & Duke. Was Allianz, VantAI, TUM. BioCS+ML dude.
Lab page: https://machine.learning.bio
GScholar: https://scholar.google.com/citations?user=4q0fNGAAAAAJ
In-depth, independent reporting to better understand the world, now on Bluesky. News tips? Share them here: http://nyti.ms/2FVHq9v
PhD candidate at UCSD. Prev: NVIDIA, Meta AI, UC Berkeley, DTU. I like robots 🤖, plants 🪴, books 📚, and they/them pronouns 🏳️🌈
https://www.nicklashansen.com
Professor for Visual Computing & Artificial Intelligence @TU Munich
Co-Founder @synthesiaIO
Co-Founder @SpAItialAI
https://niessnerlab.org/publications.html
Official account for IEEE/CVF Conference on Computer Vision & Pattern Recognition. Hosted by @CSProfKGD with more to come.
📍🌎 🔗 cvpr.thecvf.com 🎂 June 19, 1983
Official Account for the European Conference on Computer Vision (ECCV) #ECCV2026, Malmo 🇸🇪 Hosted by @jbhaurum and @CSProfKGD
San Diego Dec 2-7, 25 and Mexico City Nov 30-Dec 5, 25. Comments to this account are not monitored. Please send feedback to townhall@neurips.cc.
We advance science and technology to benefit humanity.
http://microsoft.com/research
Research Scientist at NVIDIA. Robotics. 🤖
🔗 https://clemense.github.io/
Comics by Jorge Cham: Oliver's Great Big Universe, Elinor Wonders Why, ScienceStuff and PHD Comics
 20.10.2025 06:39 — 👍 1 🔁 0 💬 0 📌 0
20.10.2025 06:39 — 👍 1 🔁 0 💬 0 📌 0