Any opinions on "Toward Data Science" moving off of Medium.com? Wonder how many authors have published on TDS because it was on Medium.
04.02.2025 03:23 — 👍 0 🔁 0 💬 0 📌 0
@correlllab.bsky.social
Correll Lab at the University of Colorado Boulder.
Any opinions on "Toward Data Science" moving off of Medium.com? Wonder how many authors have published on TDS because it was on Medium.
04.02.2025 03:23 — 👍 0 🔁 0 💬 0 📌 0Deep Seek just released the multi-modal model Janus-Pro github.com/deepseek-ai/...
28.01.2025 00:24 — 👍 2 🔁 0 💬 0 📌 0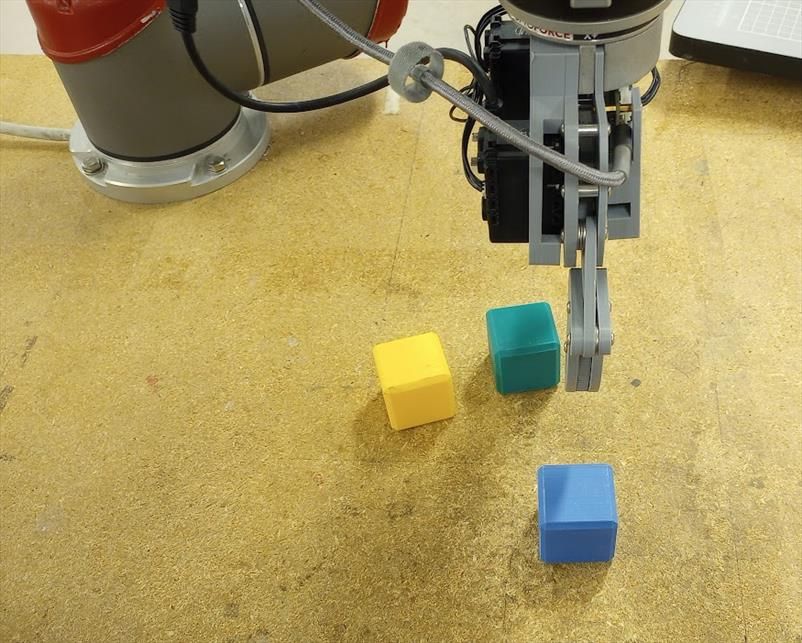
End-to-end learning datasets should include negative examples, check out James Watson’s block-stacking dataset medium.com/correll-l...
04.01.2025 23:00 — 👍 2 🔁 0 💬 0 📌 0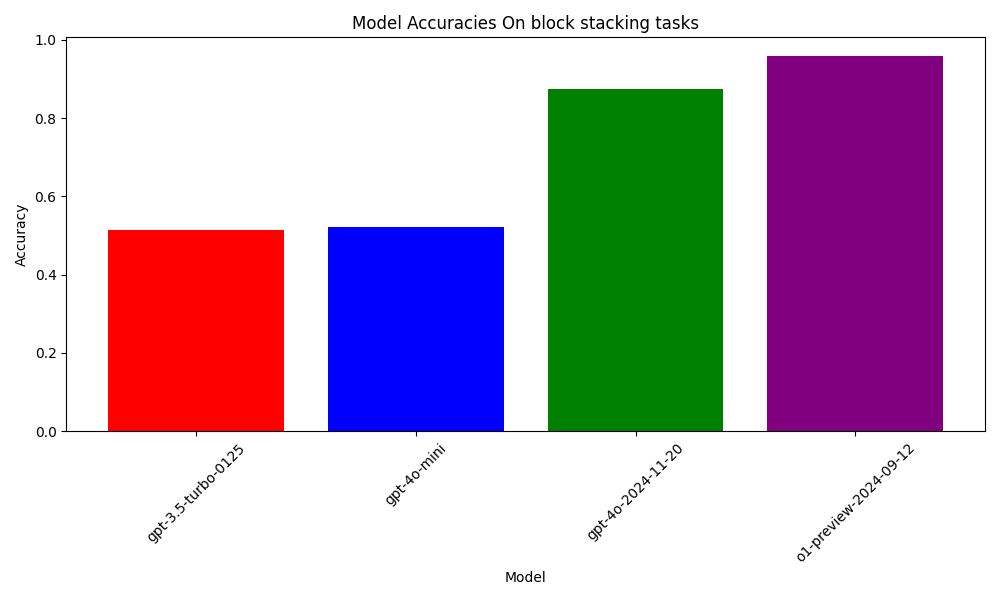
We tested out-of-the-box VLM reasoning for robotic block stacking with ChatGPT4o (95%) a huge step up, but symbolic planning is still needed medium.com/correll-l...
03.01.2025 23:00 — 👍 0 🔁 0 💬 0 📌 0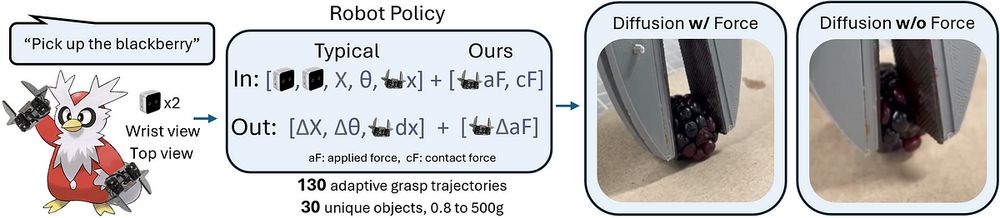
Robot end-to-end learning gets better when including force medium.com/correll-l...
02.01.2025 23:00 — 👍 2 🔁 1 💬 0 📌 0
More and more folks discover the power of tactile/force information in end-to-end learning manipulation medium.com/correll-l...
01.01.2025 23:00 — 👍 1 🔁 1 💬 0 📌 0
Building CLIP from scratch to identify sport celebrities medium.com/correll-l...
31.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0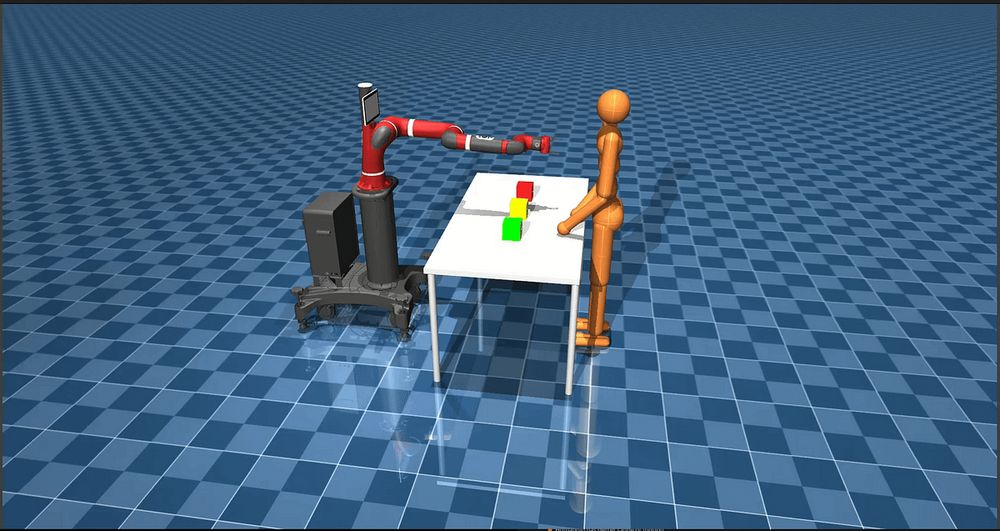
Check out Aritra and Himanshu’s attempt to solve BeliefMDPs with diffusion models medium.com/correll-l...
30.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0
Two approaches of how to squeeze large (T)VLMs onto a 4090 medium.com/correll-l...
29.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0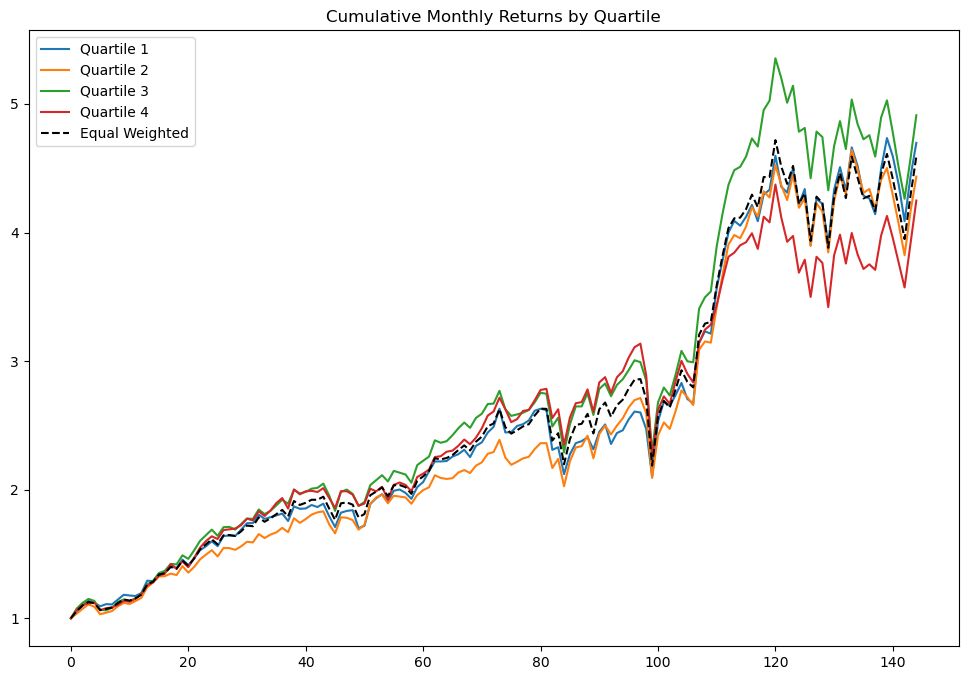
Spectrogram and Vision Transformers a powerful tool for time-series analysis medium.com/correll-l...
28.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0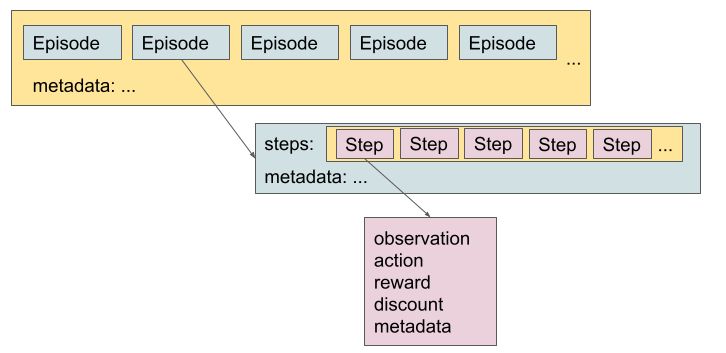
A tutorial on training multi-modal end-to-end robot policies with DROID medium.com/correll-l...
27.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0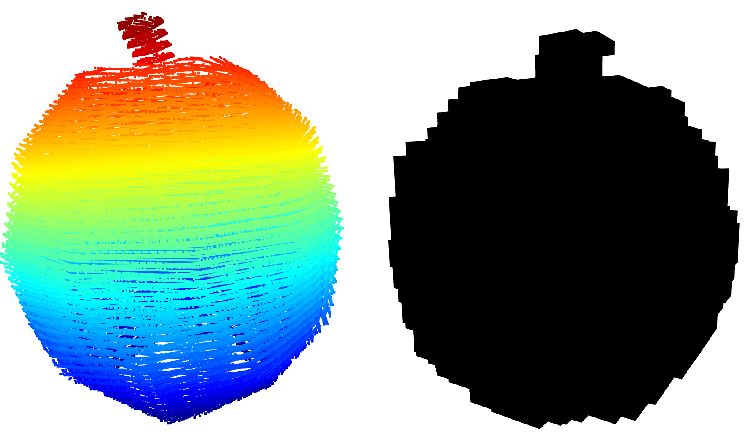
Using ControlNets to condition diffusion to in-paint 3D point clouds for manipulation medium.com/correll-l...
27.12.2024 15:00 — 👍 0 🔁 0 💬 0 📌 0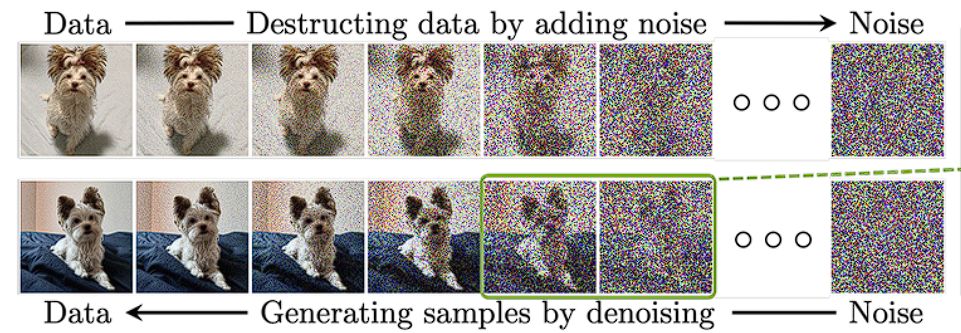
Diffusion models are emerging as an universal frontend in robotic foundation models. Find out how they work in Yutong Zhang’s summary of the original robotic diffusion paper medium.com/correll-l...
26.12.2024 23:00 — 👍 1 🔁 1 💬 0 📌 0Add to that to using blogging and youtube to create accessible versions of their work that can be consumed quickly. (And focussing on a low-ceiling summary will also help during the paper creation process - if the paper cannot be summarized in one sentence why should anyone read it?)
26.12.2024 20:39 — 👍 0 🔁 0 💬 0 📌 0
More and more folks discover the power of tactile/force information in end-to-end learning manipulation medium.com/correll-l...
25.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0
End-to-end learning datasets should include negative examples, check out James Watson’s block-stacking dataset medium.com/correll-l...
24.12.2024 23:00 — 👍 2 🔁 0 💬 0 📌 0
Just WOW: youtu.be/X2UxtKLZnNo?...
24.12.2024 03:41 — 👍 21 🔁 6 💬 3 📌 2
Robot end-to-end learning gets better when including force medium.com/correll-l...
23.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0Still hoping humanoids will solve the greenfield vs brownfield problem that robots suffer also in this industry
22.12.2024 23:31 — 👍 1 🔁 0 💬 0 📌 0
😂
22.12.2024 08:50 — 👍 415 🔁 70 💬 6 📌 4@wxie.bsky.social
22.12.2024 23:13 — 👍 1 🔁 0 💬 0 📌 0Open-source implementation of robot policy with Flow Matching 🔥
github.com/HRI-EU/flow...
Great work from Fan Zhang and Michael Gienger from Honda Research Institute EU!
Great direction!
22.12.2024 23:10 — 👍 0 🔁 0 💬 0 📌 0
i read five papers on tactile robot policies and wrote about them: medium.com/correll-lab/...
the first step of me writing my prelim and i hope to have some more interesting synthesis soon. this is in no way a comprehensive review and i welcome recommendations of papers to read!
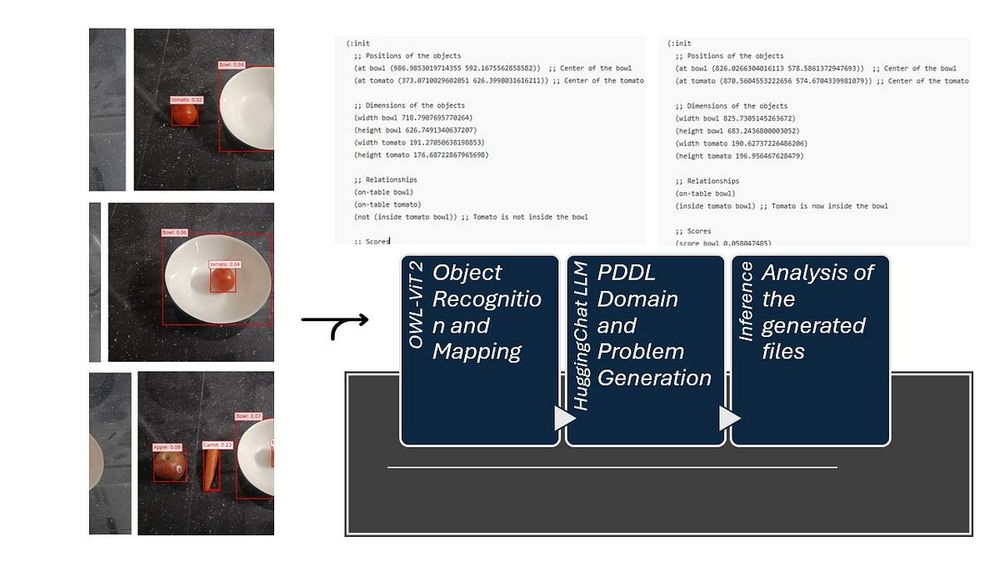
Check out Praneeth Nemani’s work on using VLMs to provide scene understanding to symbolic planning medium.com/correll-l...
22.12.2024 23:00 — 👍 2 🔁 0 💬 0 📌 0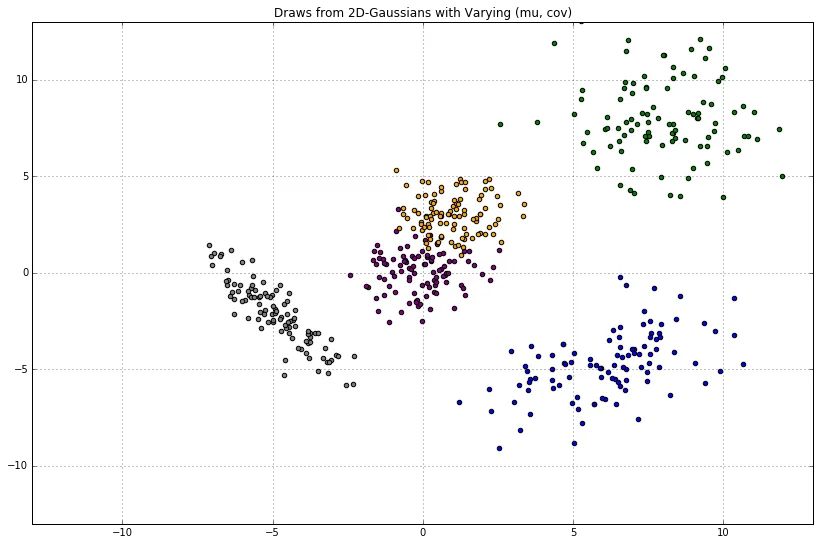
Neural networks do historically bad on sets, check out Himanshu Gupta’s review on set transformers medium.com/correll-l...
21.12.2024 23:00 — 👍 2 🔁 0 💬 0 📌 0
Follow and engage with our research on humanoid robots on medium.com/correll-lab
20.12.2024 23:00 — 👍 1 🔁 0 💬 0 📌 0
We tested out-of-the-box VLM reasoning for robotic block stacking with ChatGPT4o (95%) a huge step up, but symbolic planning is still needed medium.com/correll-l...
19.12.2024 23:00 — 👍 0 🔁 0 💬 0 📌 0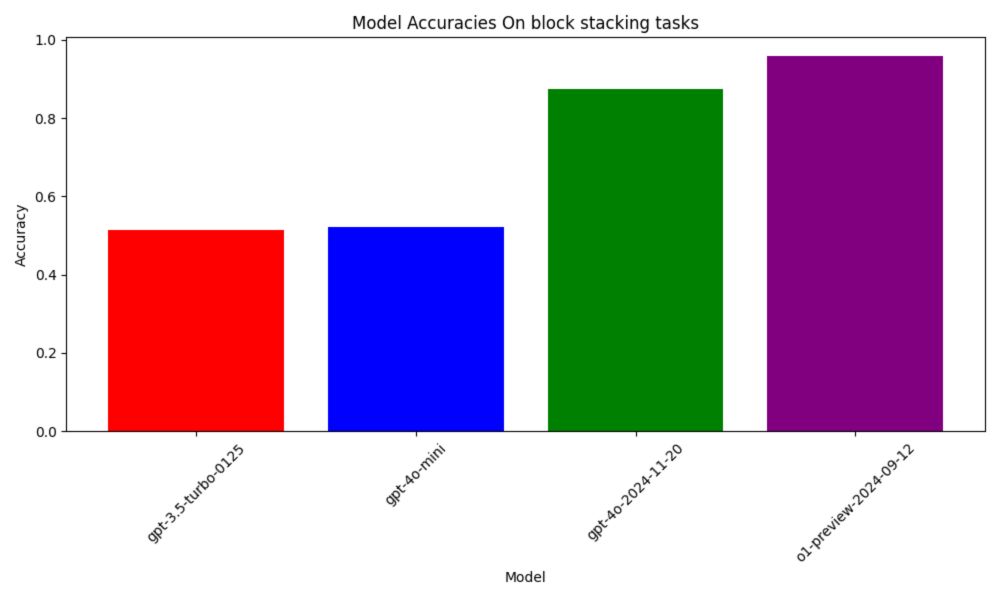
Cool! We just released a benchmark dataset on medium.com/correll-lab/...
19.12.2024 11:25 — 👍 2 🔁 0 💬 0 📌 0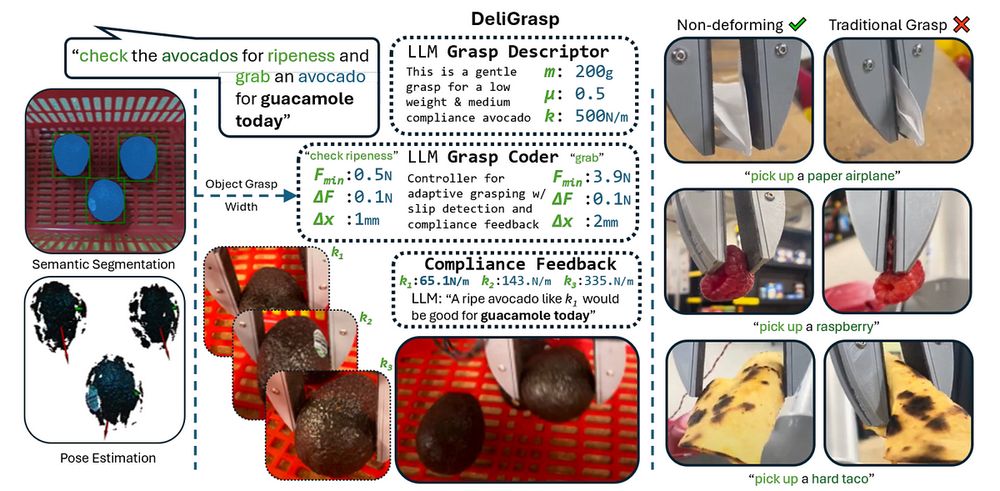
Check out how ChatGPT can provide common sense knowledge for better grasping medium.com/towards-d...
18.12.2024 23:00 — 👍 1 🔁 0 💬 0 📌 1