Seriously impressive demo by Boston Dynamics showing full body manipulation. This shows interaction with a complex environment rather than treating it as a disturbance like in all the robot dance videos.
youtu.be/HYwekersccY?...

@masundermeyer.bsky.social
3D Computer Vision & ML Research Scientist @Google
Seriously impressive demo by Boston Dynamics showing full body manipulation. This shows interaction with a complex environment rather than treating it as a disturbance like in all the robot dance videos.
youtu.be/HYwekersccY?...
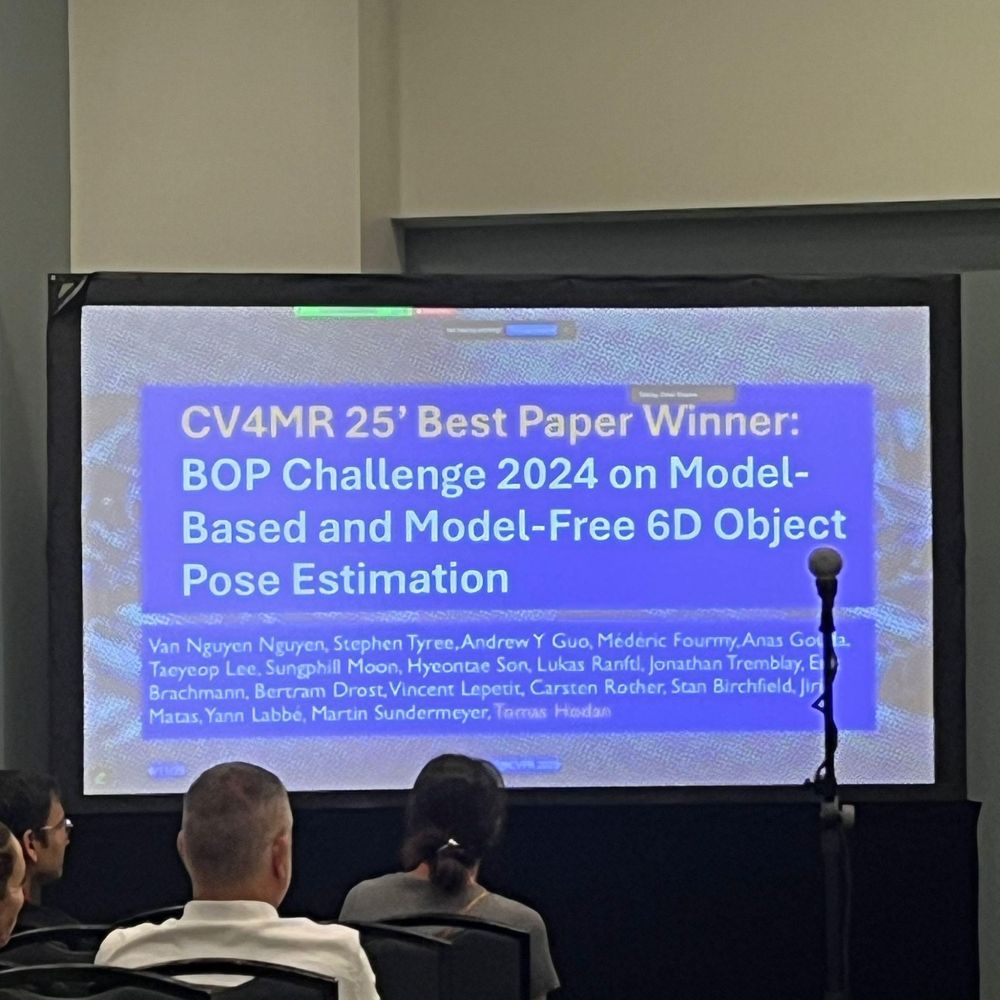
Yesterday, our latest BOP Challenge report on model-based and model-free object pose estimation just received the Best Paper Award at the Computer Vision for Mixed Reality CVPR'25 Workshop :)
Check it out here: arxiv.org/abs/2504.02812
Therefore, I'm quite excited to have docker-based robot grasping evaluations of SoTA pose detection algorithms from BOP!
The BOP challenge 2025 is still open for submissions. Present your results at our ICCV 2025 R6D workshop in Hawaii.
6D pose detection metrics and grasp success rates strongly correlate, but they are not identical. Average Precision is a great threshold-free detection metric, but grasp success is often determined by the highest confident target object pose.
12.06.2025 12:33 — 👍 0 🔁 0 💬 1 📌 0At 4pm we will also give a talk on the early-bird results of the BOP challenge that now contains the same Industrial Plenoptic dataset and compare to the robotic BPC challenge (bpc.opencv.org).
12.06.2025 12:33 — 👍 0 🔁 0 💬 1 📌 0If you are at #CVPR_2025 today and into robotics, join our Workshop on Perception for Industrial Robotics Automation. We present the results of a joint pose estimation and grasping challenge on real robots, organized with #OpenCV and #Intrinsic, and announce 60k$ in prices.
12.06.2025 12:33 — 👍 5 🔁 0 💬 1 📌 0

Does the recent progress in 3D vision transfer to challenging real-world problems in robotics and XR?
Proof it and participate in the BOP challenge 2025 featuring real-world datasets and tasks. bop.felk.cvut.cz/challenges/
Got some recent research related to 6D Object Pose Estimation? Want to present it at #ICCV2025 in Hawaii? 🌴
Then submit and present at the 𝟏𝟎𝐭𝐡 𝐈𝐧𝐭𝐞𝐫𝐧𝐚𝐭𝐢𝐨𝐧𝐚𝐥 𝐖𝐨𝐫𝐤𝐬𝐡𝐨𝐩 𝐨𝐧 𝐑𝐞𝐜𝐨𝐯𝐞𝐫𝐢𝐧𝐠 𝟔𝐃 𝐎𝐛𝐣𝐞𝐜𝐭 𝐏𝐨𝐬𝐞 (𝐑𝟔𝐃).
Paper deadlines: Jun 30 (in-proceedings), Aug 29 (non-proceedings)



 02.03.2025 21:50 — 👍 2 🔁 0 💬 0 📌 0
02.03.2025 21:50 — 👍 2 🔁 0 💬 0 📌 0
Real-time processing of sensor streams is crucial for robotics and AR. We introduce Troy-Vis, a real-time, open-vocabulary video instance segmentation method which will be presented in an oral presentation at WACV tomorrow.
Paper: arxiv.org/abs/2412.04434
Code: github.com/google-resea...
In collaboration with Intrinsic and OpenCV we are running a new pose estimation + bin picking challenge that is decided by real robot grasp metrics. 🦾
Take the chance to bring your methods alive, win generous prices and present your approach at CVPR'25. 🏆

I'm still not used to generating realistic 4K videos in 1-2 minutes.. Glitches occur less frequently and physics are often imitated impressively well. #Veo2
youtu.be/w-lfkTrijv4?...
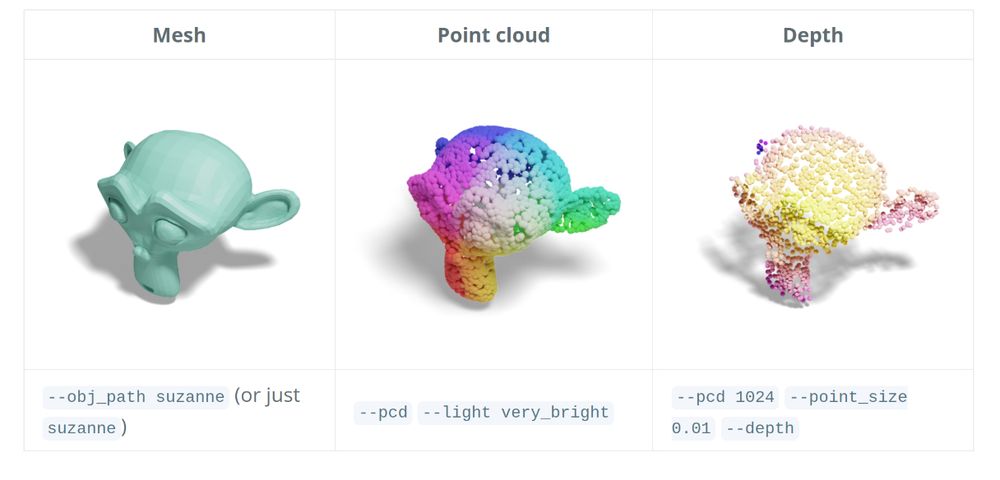
A screenshot of output from the blenderproc tool, with associated options. Left: Mesh Middle: Point Cloud Right: Depth
Publication-ready visualization of 3D objects and point clouds in seconds, using @blender.org and BlenderProc.
hummat.github.io/bproc-pubvis/
1/ Excited to share that our latest work from Intrinsic will be presented as a paper at SIGGRAPH Asia 2024! 🎉
We’ve developed a plenoptic 3D vision system that addresses a key challenge in industrial robotics: providing robots reliable 3D input data. 🧵⬇️
I'm open for new ways, like OpenReview on every arxiv paper with a community that creates incentives to collectively review all of them.
25.11.2024 20:44 — 👍 3 🔁 0 💬 0 📌 0Kaggle, Twitter, Discord and Github are great for mainstream and applied topics. But attention is not infinite and not fairly distributed. Peer review is not perfect but it ensures >0 closer looks on every idea, i.e. efficiently distributed attention.
25.11.2024 20:42 — 👍 3 🔁 0 💬 0 📌 0
Interested to learn more?
Watch the recording of our ECCV 2024 workshop on Recovering 6D Object Pose.
Find the program and speakers here:
cmp.felk.cvut.cz/sixd/worksho...