Check out our new work on the relationship between glioma and system-level functional networks! We identify that nearly all gliomas localize within a common brain functional network, Action-Mode Network (AMN) .
biorxiv.org/content/10.64898/2026.01.05.697608v1
06.01.2026 07:25 — 👍 20 🔁 9 💬 8 📌 4

Just finished Natural Neuroscience – a book I think will become an instant classic. This book can do for neuroscience what Schrodinger’s ‘What is Life’ did to usher in the golden age of molecular biology. Nachum Ulanovsky has given us a compelling call to arms to truly understand the brain.
16.05.2025 10:01 — 👍 73 🔁 9 💬 3 📌 2

🧠 New paper alert (the 1st one from our new lab)!
Led by 1st author & VR wizard @jaquent.bsky.social
@natcomms.nature.com
How do our brains distinguish novel from familiar places as we explore our environments, e.g., a new city?
🔗 doi.org/10.1038/s414...
🧵 Thread below with key findings ⬇️
09.12.2025 09:49 — 👍 26 🔁 12 💬 1 📌 2
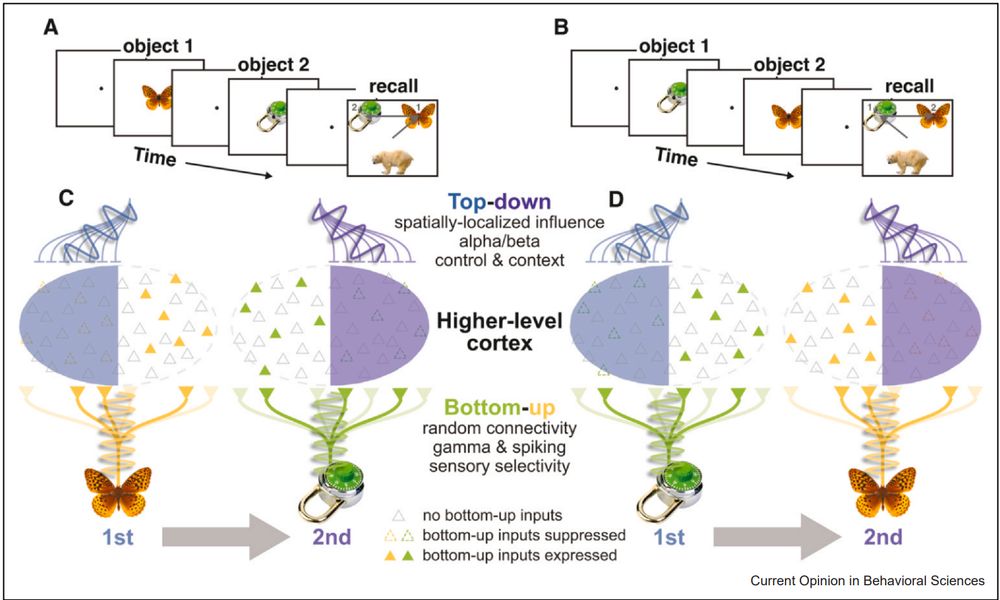
𝗪𝗵𝗮𝘁'𝘀 𝗰𝗼𝗴𝗻𝗶𝘁𝗶𝗼𝗻 𝗮𝗻𝗱 𝗶𝘀 𝗶𝘁 𝗲𝗺𝗲𝗿𝗴𝗲𝗻𝘁?
Don't miss the Neuroscience and Philosophy Salon.
Earl Miller and team will discuss recent paper and we'll have plenty of discussion. Open to all.
Sept 12, noon EST-US
umd.zoom.us/meeting/regi...
#neuroskyence
@earlkmiller.bsky.social
24.08.2025 16:06 — 👍 74 🔁 24 💬 5 📌 3
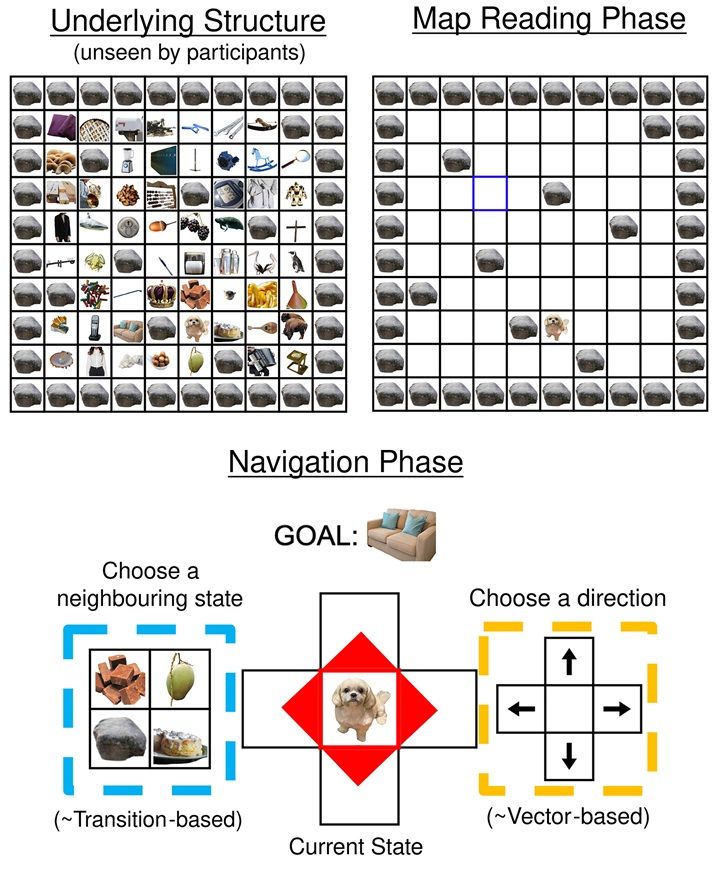
Task design and experimental set-up. Top left: underlying structure of the 8 × 8 grid, unseen by participants. Every state is represented by an image of an object, and these objects and their positions change on every trial. Top right: schematic diagram of the ‘map reading’ phase of each trial. Participants see a top–down view of the grid with objects obscured and successively click on blue squares to reveal ‘landmark’ objects at the location. After 16 clicks have been completed, a yellow square appears. Clicking on the yellow square reveals the ‘goal’ object for the trial. Bottom: schematic diagram of the navigation phase of each trial. Participants start in a random, previously unobserved location and are tasked with navigating to the ‘goal’ object they had just learnt about (displayed at the top). They can navigate in two ways. First, they could choose a direction to travel in by clicking on the corresponding arrow (highlighted yellow). This is analogous to using a ‘vector-based’ strategy. Alternatively, they could choose an adjacent state to travel to by clicking on one of the associated images (displayed in a random order; highlighted blue). This corresponds to using a ‘transition-based’ navigation strategy.
How do humans navigate unfamiliar environments? @denislan.bsky.social @lhuntneuro.bsky.social @summerfieldlab.bsky.social show that humans & deep meta-learning networks combine ‘vector-based’ & ‘transition-based’ strategies for flexible navigation in similar ways @plosbiology.org 🧪 plos.io/45uSwNm
01.08.2025 08:27 — 👍 9 🔁 2 💬 0 📌 1
Absolute thrill to be part of this team and to be able to piggy-back on this post
28.06.2025 07:48 — 👍 3 🔁 0 💬 0 📌 0
Hot off the press, by my brilliant colleague Ashley Zhou
26.06.2025 07:35 — 👍 4 🔁 0 💬 0 📌 0
Last chance to have a chat about naturalistic decision-making by my poster! #OHBM2025
26.06.2025 04:43 — 👍 3 🔁 0 💬 0 📌 0
Just arrived in Brisbane with the loveliest of teams. Can't wait to connect with fellow neuronerds at #OHBM2025!
23.06.2025 01:20 — 👍 3 🔁 1 💬 0 📌 0
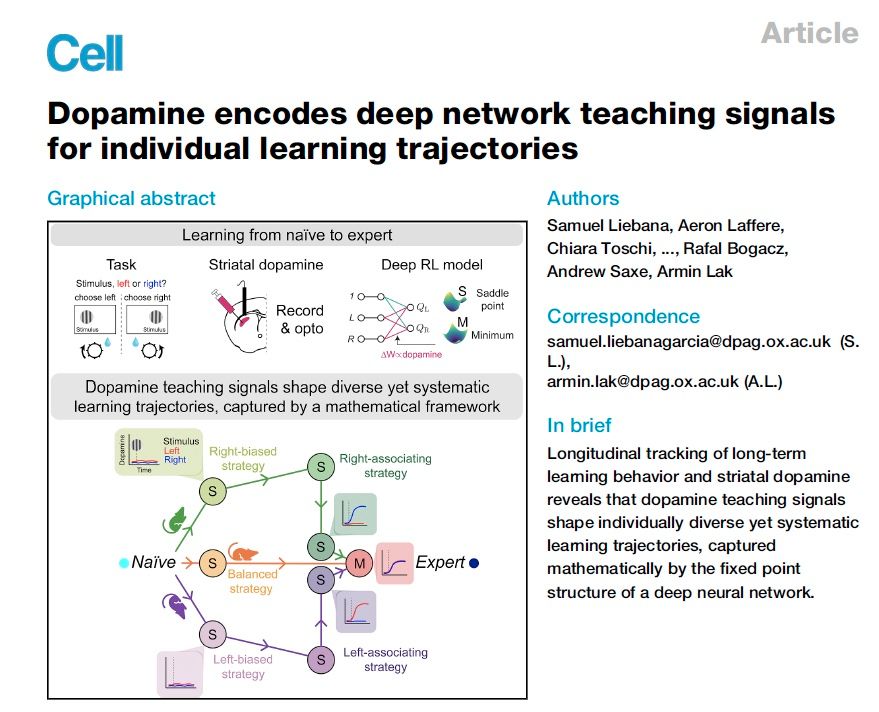
Our work, out at Cell, shows that the brain’s dopamine signals teach each individual a unique learning trajectory. Collaborative experiment-theory effort, led by Sam Liebana in the lab. The first experiment my lab started just shy of 6y ago & v excited to see it out: www.cell.com/cell/fulltex...
11.06.2025 15:17 — 👍 211 🔁 71 💬 7 📌 2
Postdoctoral researcher interested in Memory, the Hippocampus, and Open Science
PhD student in the Object Vision Group at CIMeC, University of Trento. Interested in neuroimaging and object perception. He/him 🏳️🌈
https://davidecortinovis-droid.github.io/
phd student in psychology @ oxford uni, summerfield & hunt labs
Scientific AI/ machine learning, dynamical systems (reconstruction), generative surrogate models of brains & behavior, applications in neuroscience & mental health
Control Systems Engineer. Visiting fellow with NIMH.
Grad Student @ SKKU
github: https://github.com/didch1789
Proud dad, Professor of Computational Cognitive Neuroscience, author of The Decoding Toolbox, founder of http://things-initiative.org
our lab 👉 https://hebartlab.com
postdoc with Marcelo Mattar - https://carlos.correa.me/
Postdoctoral researcher at Columbia University studying human mind with fMRI 🧠
MS-PhD combined student studying pain😖, emotion💕 and music🎶 using fMRI🧠 in Cocoan lab (SKKU/CNIR)
Lab: https://cocoanlab.github.io
Lab Instagram: https://instagram.com/cocoanlab/
Professor, Semel Institute for Neuroscience and Behavior, UCLA (https://profiles.ucla.edu/lucina.uddin)
Director, Brain Connectivity and Cognition Lab (https://teams.semel.ucla.edu/bccl)
Available for academic career advice. I never said *good* advice.
CIHR Postdoc Fellow at the MNI @theneuro.bsky.social | PhD @mrccbu.bsky.social in Cambridge | Cognitive control, Attention, Domain-general brain networks | Multimodal neuroimaging | Gates Cambridge Scholar
Assistant Professor at the University of Alberta. Amii Fellow, Canada CIFAR AI chair. Machine learning researcher. All things reinforcement learning.
📍 Edmonton, Canada 🇨🇦
🔗 https://webdocs.cs.ualberta.ca/~machado/
🗓️ Joined November, 2024
Neuroscientist | Professor of Medical Psychology at U Bonn | PI Neuroscience of Motivation, Action, & Desire Lab at U Bonn & Tübingen
aka @cornu_copiae
Child psychiatrist, neuroscientist, she/her. Using movies to study functional brain organization at University of British Columbia, Canada, @UBC and @BCCHresearch
Theoretical Scientist | Researcher & Philosopher
Head of Research Department, RO Educational Institute
https://www.researchgate.net/profile/Jalal-Khawaldeh
https://orcid.org/0009-0003-7872-1967
The Institute for Mind and Brain at the University of South Carolina works to understand the biological bases of the mind, brain, and cognition and intersections with health, aging, and neurodevelopment.