A Boston Dynamics robot dog stands on a walkway through grass at the base of large cherry trees full of blooms

Close-up of the chest and head of a Boston Dynamics robot dog framed by trees full of cherry blossoms

Three smiling researchers dressed in casual clothing, one pulling a wagon, walk behind a Boston Dynamics robot dog with campus buildings and trees in the background

A researcher holding a handheld controller follows a Boston Dynamics robot dog down a building ramp while another researcher standing a few meters away holding a laptop looks on
If you visited the @uwcherryblossom.bsky.social, did you “spot” an unusual visitor among the blooms? Researchers in the @uofwa.bsky.social #UWAllen #robotics group recently took advantage of some nice weather to take our Boston Dynamics robot dog for a stroll around campus. #AI 1/5
02.05.2025 23:28 — 👍 11 🔁 4 💬 2 📌 1
thanks for sharing this! this class is awesome :D
20.04.2025 07:00 — 👍 0 🔁 0 💬 0 📌 0
This is very cool work, and reminds me of some of the objectives of the LAGR project.
It's also pretty impressive to see robot experiments with different baseline methods in closed loop!
18.04.2025 18:04 — 👍 2 🔁 1 💬 0 📌 1
Long Range Navigator gives you the best of both worlds: accurate planning with 3D perception in the short-medium range, and long-range reasoning about distant frontiers in image space! Check out @rohanblueboybaijal.bsky.social's thread for more details :)
18.04.2025 17:59 — 👍 2 🔁 0 💬 0 📌 0
Long Range Navigator (LRN) 🧭— an approach to extend planning horizons for off-road navigation given no prior maps. Using vision LRN makes longer-range decisions by spotting navigation frontiers far beyond the range of metric maps.
personalrobotics.github.io/lrn/
🧵1/6
18.04.2025 17:56 — 👍 3 🔁 4 💬 1 📌 3

Vivian Shen's 3MT presentation titled, "Body-Aligned Design for Haptic Immersion in Extended Reality."
Congrats to Three Minute Thesis preliminary round 5 co-winner, Vivian Shen of @cmurobotics.bsky.social! 📣
Since it began in 2014, 15% of #3MT @carnegiemellon.bsky.social finalists have come from @scsatcmu.bsky.social.
⏰ Join us for the #3MTCMU Championship on 3/11 from 6-8pm. cmu.is/2025-3MT-Champ
21.02.2025 18:10 — 👍 5 🔁 3 💬 0 📌 0
MuJoCo Playground
An open-source framework for GPU-accelerated robot learning and sim-to-real transfer
Introducing playground.mujoco.org
Combining MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Get started today: pip install playground
16.01.2025 20:48 — 👍 74 🔁 20 💬 1 📌 3
These are beautiful! Where are the forest pictures from?
13.01.2025 03:07 — 👍 0 🔁 0 💬 1 📌 0
Looking forward to it!!
11.01.2025 05:44 — 👍 0 🔁 0 💬 0 📌 0
fire 🙌
24.12.2024 04:14 — 👍 1 🔁 0 💬 0 📌 0
Have some offline data lying around? Use it to robustify few-shot imitation learning! 🤖
STRAP 🎒 is a retrieval-based method that leverages semantic sub-trajectories in offline datasets to augment the training data.
🧵 1/6
20.12.2024 23:28 — 👍 6 🔁 2 💬 1 📌 0

RLHF 101: A Technical Dive into RLHF
A Blog post by Zhaolin Gao on Hugging Face
The more time I spend on RLHF, the more I realize the devil is in the details (even more than RL for continuous control). My co-author Zhaolin Gao wrote this excellent blog post on some of these details: huggingface.co/blog/GitBag/.... Maybe it'll be your savior!
11.12.2024 20:05 — 👍 22 🔁 4 💬 0 📌 0
SocialRL Lab
We are the Social Reinforcement Learning Lab at the University of Washington.
Even though the Social RL lab only got started ~1 year ago, I’m super excited to announce that we have 10 people from the lab presenting their work at #NeurIPS2024. Delighted to officially introduce our lab: socialrl.cs.washington.edu! Thread with all our NeurIPS work below 👇
11.12.2024 20:00 — 👍 52 🔁 10 💬 1 📌 0
BAKU is fully open source and surprisingly effective. We found it easily adaptable for a host of visuotactile tasks in visuoskin.github.io
10.12.2024 18:23 — 👍 8 🔁 2 💬 0 📌 0

Heading to #NeurIPS2024 to present Cambrian-1! Catch our oral presentation Friday @ 10am (Oral 5C) and our poster afterwards until 2pm (#3700 in East Hall A-C) 🪼🎉
10.12.2024 17:31 — 👍 3 🔁 1 💬 1 📌 0
P3-PO is a great example of how simple human priors can facilitate significantly better generalizability for robot policies.
10.12.2024 20:48 — 👍 3 🔁 2 💬 0 📌 0
NeurIPS Poster The Importance of Online Data: Understanding Preference Fine-tuning via CoverageNeurIPS 2024
I will present two papers at #NeurIPS2024!
Happy to meet old and new friends and talk about all aspects of RL: data, environment structure, and reward! 😀
In Wed 11am-2pm poster session I will present HyPO-- best of both worlds of offline and online RLHF: neurips.cc/virtual/2024...
09.12.2024 19:48 — 👍 9 🔁 2 💬 1 📌 0
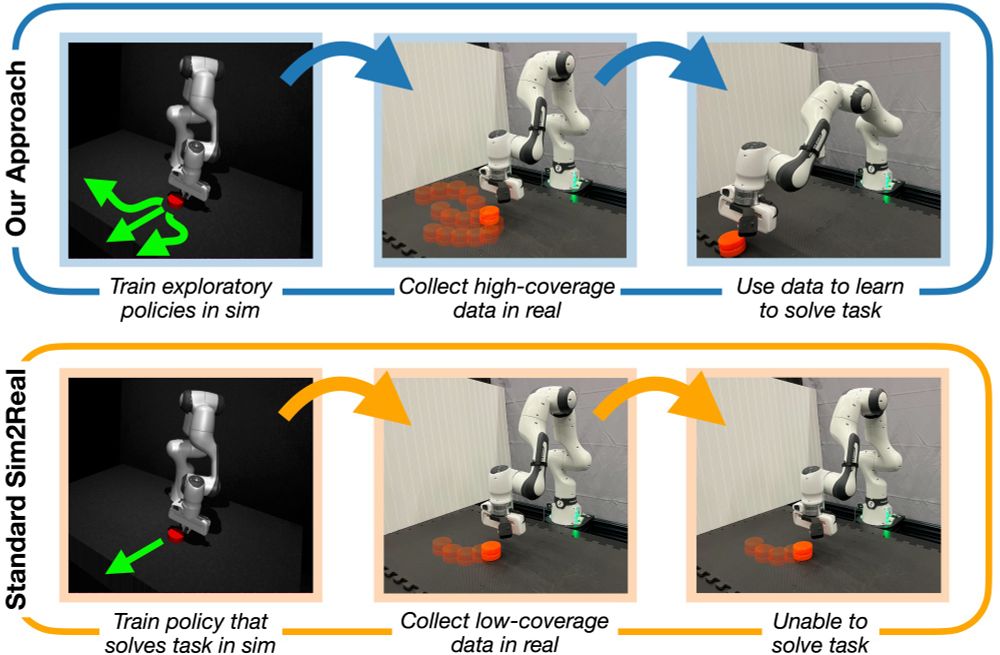
We’ve been investigating how sim, while wrong, can be useful for real-world robotic RL! In our #NeurIPS2024 work, we theoretically showed how naive sim2real transfer can be inefficient, but if you *learn to explore* in sim, this transfers to the real world! We show this works on real robots! 🧵(1/6)
06.12.2024 00:46 — 👍 13 🔁 5 💬 2 📌 0

we've used Atari games as an RL benchmark for so long, but for a little while it's bugged me that it's a discrete action problem, since the original joysticks were analog...
@jessefarebro.bsky.social & i fix this by introducing the Continuous ALE (CALE)!
read thread for details!
1/9
05.12.2024 23:23 — 👍 30 🔁 7 💬 1 📌 3
I'm excited about scaling up robot learning! We’ve been scaling up data gen with RL in realistic sims generated from crowdsourced videos. Enables data collection far more cheaply than real world teleop. Importantly, data becomes *cheaper* with more environments and transfers to real robots! 🧵 (1/N)
05.12.2024 02:12 — 👍 21 🔁 11 💬 3 📌 0

Allen School Starter Pack
Join the conversation
We created an Allen School Starter Pack to help you find and connect with @uofwa.bsky.social #UWAllen labs and researchers on 🦋! We'll add to this list as we grow our community here: go.bsky.app/RyHBLJd
#AcademicBluesky #CompSci #AI #CompBio #UbiComp #Accessibility #NLP #HCI #DataViz #mHealth
26.11.2024 19:49 — 👍 28 🔁 7 💬 0 📌 0
I'll be presenting AnySkin at the Stanford Center for Design Research today at 2pm! Stop by for a chat and try the sensor out!
More info: any-skin.github.io
25.11.2024 18:15 — 👍 6 🔁 2 💬 0 📌 0

End of an era as Kevin Tracy defends his PhD. Kevin has been with the lab since the very beginning at Stanford, through the move to CMU. He's done amazing optimization-based control work with applications spanning aerospace and robotics and it has been an absolute pleasure working with him.
22.11.2024 19:08 — 👍 12 🔁 4 💬 1 📌 0
PhD candidate at UCSD. Prev: NVIDIA, Meta AI, UC Berkeley, DTU. I like robots 🤖, plants 🪴, and they/them pronouns 🏳️🌈
https://www.nicklashansen.com
Roboticist, predoctoral researcher at @Ai2.bsky.social
Bot. I daily tweet progress towards machine learning and computer vision conference deadlines. Maintained by @chriswolfvision.bsky.social
From SLAM to Spatial AI; Professor of Robot Vision, Imperial College London; Director of the Dyson Robotics Lab; Co-Founder of Slamcore. FREng, FRS.
Google Chief Scientist, Gemini Lead. Opinions stated here are my own, not those of Google. Gemini, TensorFlow, MapReduce, Bigtable, Spanner, ML things, ...
DeepMind, MuJoCo. Love thy neighbor.
Research Scientist at NVIDIA. Robotics. 🤖
🔗 https://clemense.github.io/
I toot about open source robots and robotics.
[bridged from https://fosstodon.org/@locoscaron on the fediverse by https://fed.brid.gy/ ]
Robotics PhD at CMU
johnzhang3.github.io
Senior Staff Research Scientist @Google DeepMind, previously Stats Prof @Oxford Uni - interested in Computational Statistics, Generative Modeling, Monte Carlo methods, Optimal Transport.
Founder & executive & community builder & organizer & researcher
ML Collective (mlcollective.org)
Google DeepMind
rosanneliu.com
Robotics R&D at Intrinsic. PhD from USC RESL.
gautamsalhotra.com
Masters Student who ❤️ 🤖 @ UW! I’m Member of Weird Lab