He’s back @arhanjain.bsky.social
26.06.2025 22:44 — 👍 0 🔁 0 💬 0 📌 0
@jacob-berg.bsky.social
Masters Student who ❤️ 🤖 @ UW! I’m Member of Weird Lab
He’s back @arhanjain.bsky.social
26.06.2025 22:44 — 👍 0 🔁 0 💬 0 📌 0
Inspired by his father’s study of neural networks, #UWAllen CS and Philosophy major @andreiskiii.bsky.social taught himself the subject on his way to enrolling in UW at age 15. He just won a @pdsoros.bsky.social Fellowship to pursue a Ph.D. at MIT in #AI. pdsoros.org/fellows/andr... #HuskyExperience
10.04.2025 23:09 — 👍 4 🔁 3 💬 0 📌 0
#UWAllen & PSL - www.geekwire.com/2025/college...
13.03.2025 22:06 — 👍 2 🔁 1 💬 0 📌 0Interested in retrieving (sub-)trajectories from enormous datasets like DROID? 🦣
Check out our retrieval code using DTW and vision foundation model features!
Code: github.com/WEIRDLabUW/S...
Website: weirdlabuw.github.io/strap

The deepseek r1 paper and download links: github.com/deepseek-ai/...
20.01.2025 13:38 — 👍 12 🔁 3 💬 0 📌 0

Pilluuuuuuuuuu
05.01.2025 21:46 — 👍 1 🔁 0 💬 0 📌 0Have some offline data lying around? Use it to robustify few-shot imitation learning! 🤖
STRAP 🎒 is a retrieval-based method that leverages semantic sub-trajectories in offline datasets to augment the training data.
🧵 1/6
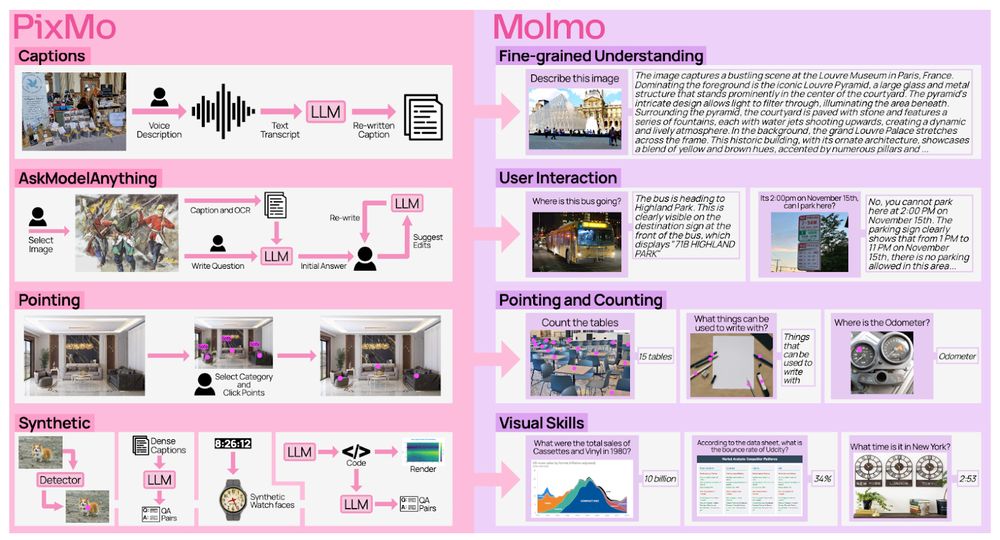
Overview of PixMo and its relation to Molmo's ability. PixMo's captions data enables Molmo's fine-grained understanding; PixMo's AskModelAnything enables Molmo's user interaction; PixMo's pointing data enables Molmo's pointing and counting; PixMo's synthetic data enables Molmo's visual skills.
Remember Molmo? The full recipe is finally out!
Training code, data, and everything you need to reproduce our models. Oh, and we have updated our tech report too!
Links in thread 👇
the science of LMs should be fully open✨
today @akshitab.bsky.social @natolambert.bsky.social and I are giving our #neurips2024 tutorial on language model development.
everything from data, training, adaptation. published or not, no secrets 🫡
tues, 12/10, 9:30am PT ☕️
neurips.cc/virtual/2024...

Can’t forget about Vienna
06.12.2024 02:14 — 👍 1 🔁 0 💬 1 📌 0
@arhanjain.bsky.social plz come home and play with me
06.12.2024 02:11 — 👍 1 🔁 0 💬 1 📌 0
@arhanjain.bsky.social’s dog at it again
06.12.2024 02:09 — 👍 2 🔁 0 💬 1 📌 0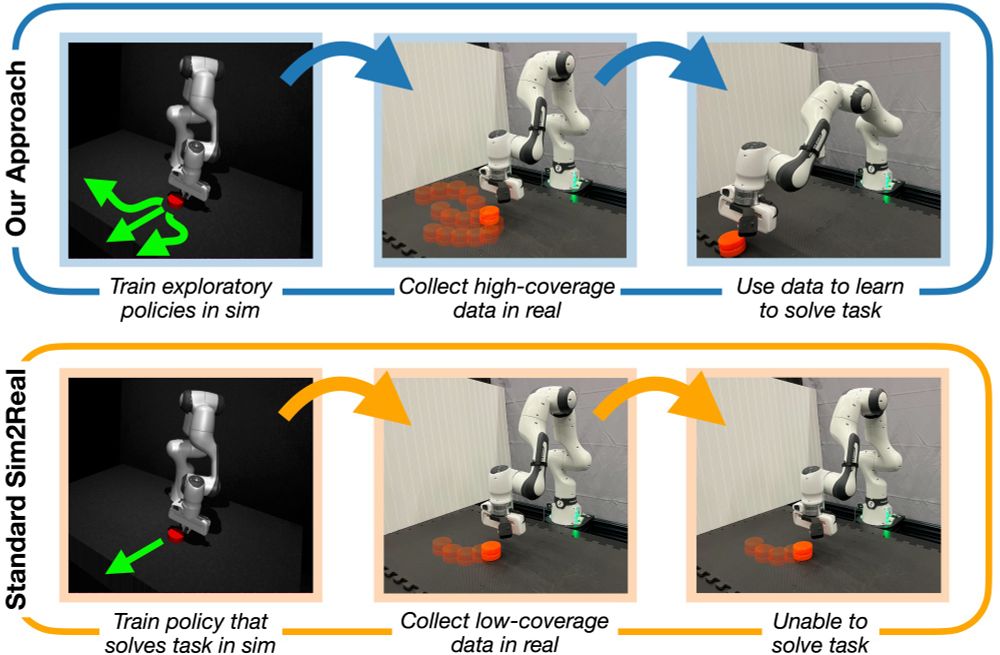
We’ve been investigating how sim, while wrong, can be useful for real-world robotic RL! In our #NeurIPS2024 work, we theoretically showed how naive sim2real transfer can be inefficient, but if you *learn to explore* in sim, this transfers to the real world! We show this works on real robots! 🧵(1/6)
06.12.2024 00:46 — 👍 13 🔁 5 💬 2 📌 0I'm excited about scaling up robot learning! We’ve been scaling up data gen with RL in realistic sims generated from crowdsourced videos. Enables data collection far more cheaply than real world teleop. Importantly, data becomes *cheaper* with more environments and transfers to real robots! 🧵 (1/N)
05.12.2024 02:12 — 👍 21 🔁 11 💬 3 📌 0
Just wanted to say @arhanjain.bsky.social has a very cute dog
05.12.2024 02:08 — 👍 5 🔁 0 💬 0 📌 0