@tuthill.bsky.social @jan-ache.bsky.social @srinituraga.bsky.social @dddavi.bsky.social @bingbrunton.bsky.social
12.09.2025 21:58 — 👍 3 🔁 0 💬 0 📌 0
Finally, I cannot end my words without thanking the open-source ecosystem that made this possible: OpenSim, MuJoCo, MyoSuite, and many more.
Code links:
• OpenSim optimization: github.com/gizemozd/neu...
• MuJoCo imitation learning: github.com/gizemozd/Fly...
12.09.2025 21:46 — 👍 4 🔁 0 💬 1 📌 0
Huge thanks to my co-first author Chuanfang Ning, whose master’s thesis sparked this project, and to all co-authors: Jasper S. Phelps, Sibo Wang-Chen (@wangchen.bsky.social), Guy Elisha, Alexander Blanke, Auke Ijspeert, Pavan Ramdya (@ramdya.bsky.social).
12.09.2025 21:44 — 👍 2 🔁 0 💬 1 📌 0
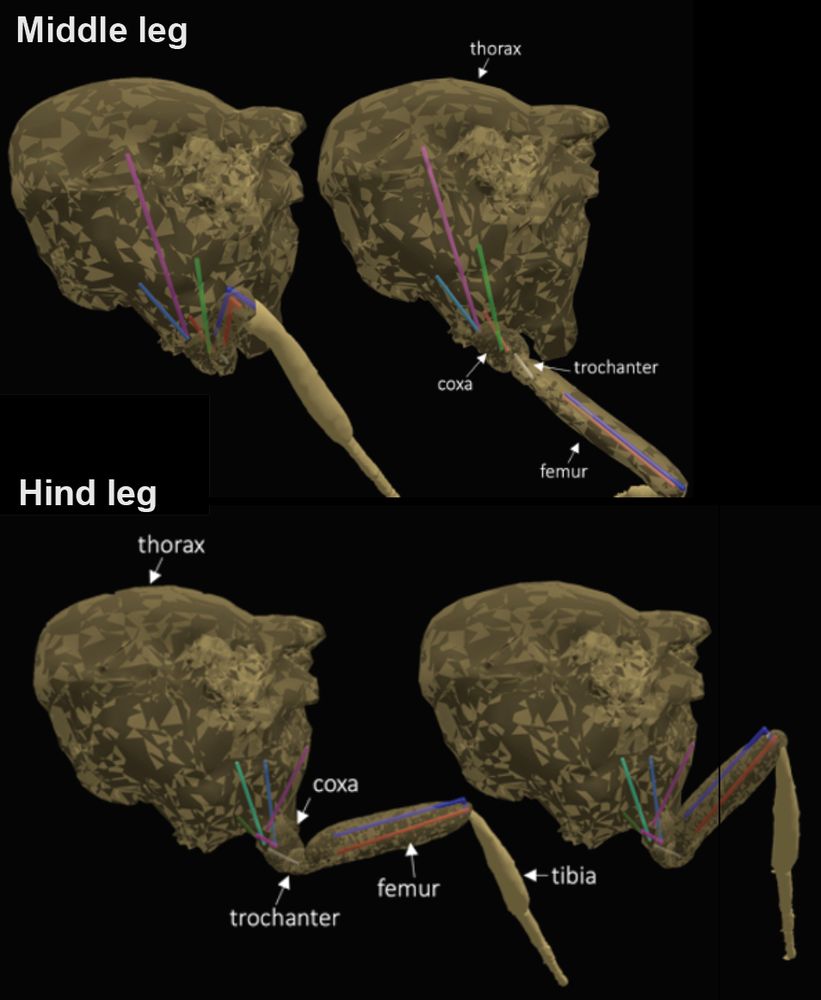
While we only optimized front-leg muscles, we provide mid & hind-leg scaffolds so their parameters can be fit next using the same pipeline. Our model bridges motor neurons and joints, paving the way for plugging more realistic neural networks derived from the connectome into embodied agents.
12.09.2025 21:40 — 👍 3 🔁 0 💬 1 📌 0

Muscles don’t act alone; passive joint properties matter too. We ported the model to MuJoCo (via MyoConverter) for large-scale, fast simulation and set up imitation learning with muscle-driven control. We found that passive properties in the joints stabilize control and speed up learning.
12.09.2025 21:36 — 👍 3 🔁 0 💬 1 📌 0
We've got moments arms covered—what about muscle force? Unlike in humans, most fly muscle parameters are unknown. So we built an optimization pipeline in OpenSim to identify Hill-type parameters to produce measured fly kinematics. This revealed coordinated, testable muscle synergies across behaviors
12.09.2025 21:31 — 👍 3 🔁 0 💬 1 📌 0
We began by tracing muscle fibers, origins/insertions, and paths from high-resolution X-ray scans across specimens. This allowed us to recover moment arms around each joint center and cross-sectional area as a prior on muscle strength.
In plain terms: torque = force x moment arm.
12.09.2025 21:28 — 👍 2 🔁 0 💬 1 📌 0
🪰 How do dozens of tiny fly muscles cooperate to move a leg?
We’re excited to share the first 3D, data-driven musculoskeletal model of Drosophila legs based on Hill-type muscles, running in OpenSim and MuJoCo simulation environments.
Preprint: arxiv.org/abs/2509.06426
12.09.2025 21:26 — 👍 55 🔁 18 💬 1 📌 1
Thanks, Ben! Looking forward to being there :)
19.07.2025 08:41 — 👍 1 🔁 0 💬 0 📌 0
Thank you so much!! I hope everything is going well for you! :)
16.07.2025 20:12 — 👍 1 🔁 0 💬 0 📌 0
Big life update: I’m super excited to be joining the Kempner Institute as a Research Fellow!
If you’re curious about my research plans or just want to connect, please reach out! 😊
16.07.2025 19:16 — 👍 19 🔁 3 💬 2 📌 0
Please RT🙏
Reach out if you want to help understand cognition by modelling, analyzing and/or collect large scale intracortical data from 👩🐒🐁
We're a friendly, diverse group (n>25) w/ this terrace 😎 in the center of Paris! See👇 for + info about the lab
We have funding to support your application!
10.05.2025 14:23 — 👍 39 🔁 21 💬 1 📌 0
📽️Recordings from our
@cosynemeeting.bsky.social
#COSYNE2025 workshop on “Agent-Based Models in Neuroscience: Complex Planning, Embodiment, and Beyond" are now online: neuro-agent-models.github.io
🧠🤖
07.04.2025 20:57 — 👍 36 🔁 11 💬 1 📌 0
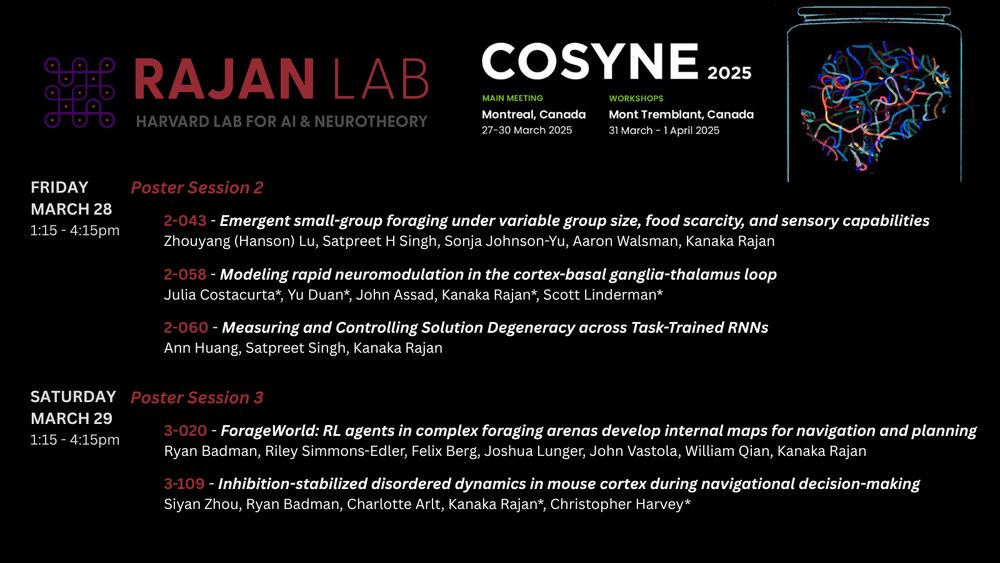
COSYNE 2025 Rajan lab posters.
Friday, March 28 - Poster Session 2:
2-043: Emergent small-group foraging under variable group size, food scarcity, and sensory capabilities by Zhouyang (Hanson) Lu, Satpreet H Singh, Sonja Johnson-Yu, Aaron Walsman, Kanaka Rajan
2-058: 'Modeling rapid neuromodulation in the cortex-basal ganglia-thalamus loop' by Julia Costacurta and Yu Duan (co-first), John Assad, Kanaka Rajan and Scott Linderman (co-senior)
2-060: 'Measuring and Controlling Solution Degeneracy across Task-Trained RNNs' by Ann Huang, Satpreet Singh, Kanaka Rajan
Saturday, March 29 - Poster Session 3:
3-020: 'ForageWorld: RL agents in complex foraging arenas develop internal maps for navigation and planning' by Ryan Badman, Riley Simmons-Edler, Joshua Lunger, John Vastola, William Qian, Kanaka Rajan
3-109: 'Inhibition-stabilized disordered dynamics in mouse cortex during navigational decision-making' by Siyan Zhou, Ryan Badman, Charlotte Arlt, Kanaka Rajan, Christopher Harvey
Big showing from the Rajan Lab at @cosynemeeting.bsky.social!
We have posters on everything from multi-agent social foraging to neuromodulated neural networks. Catch us in Poster Sessions 2 & 3 🧠🤖
#Cosyne2025 #NeuroAI #CompSci #neuroskyence
28.03.2025 15:33 — 👍 37 🔁 9 💬 0 📌 0
Sadly, I won’t be there in person this year because of visa issues :(( (yep, they’re real and they suck)... But two of my amazing co-organizers will be there: @satpreetsingh.bsky.social and @chingfang.bsky.social
27.03.2025 11:29 — 👍 4 🔁 0 💬 0 📌 0

Only 4 days to go until our workshop!! 🪰🐁🤖
If you're at COSYNE, don't miss out on incredible talks and inspiring panel discussions at "Agent-Based Models in Neuroscience: Complex Planning, Embodiment, and Beyond" on March 31 :)
Check out the latest schedule: neuro-agent-models.github.io
27.03.2025 11:27 — 👍 7 🔁 4 💬 1 📌 0
🚨 SUPER excited to announce our Cosyne workshop on Neuro Agents! 🤖🐁🪰🧠 We have an incredible lineup of speakers, check out the program! neuro-agent-models.github.io
See you in Canada! 🇨🇦
#Cosyne #Cosyne2025 #NeuroAI
18.02.2025 20:36 — 👍 4 🔁 1 💬 0 📌 0
Congrats!! I will be there as well, presenting another biomechanics paper ☺️
24.12.2024 17:46 — 👍 1 🔁 0 💬 1 📌 0
An introduction to reinforcement learning for neuroscience | Published in Neurons, Behavior, Data analysis, and Theory
By Kristopher T. Jensen. Reinforcement learning for neuroscientists
I wrote an introduction to RL for neuroscience last year that was just published in NBDT: tinyurl.com/5f58zdy3
This review aims to provide some intuition for and derivations of RL methods commonly used in systems neuroscience, ranging from TD learning through the SR to deep and distributional RL!
21.12.2024 17:59 — 👍 129 🔁 31 💬 6 📌 0
Thank you so much, John! I would love to hear your thoughts!
19.12.2024 20:22 — 👍 0 🔁 0 💬 0 📌 0
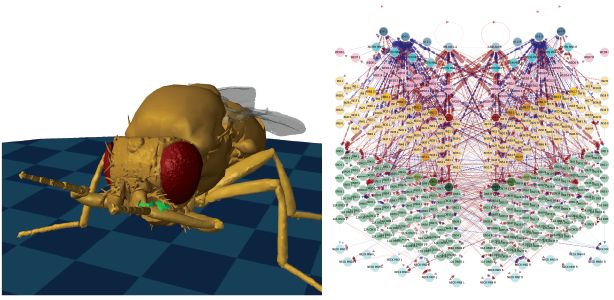
As you unwrap your holiday presents, consider how you coordinate your fingers and limbs.
@gzmozd.bsky.social identified fly brain networks for body part coordination through experiments, biomechanical modeling, connectomics, and neural network simulations ! 🤖
www.biorxiv.org/content/10.1...
18.12.2024 11:03 — 👍 9 🔁 5 💬 0 📌 0
10/ Big thanks to our amazing collaborators and the incredible fly community for creating the open-source tools that made this work possible. 🙌 #Neuroscience #MotorControl #Drosophila #Connectome @neuroxepfl.bsky.social @fly-eds.bsky.social @flywire.bsky.social
18.12.2024 17:20 — 👍 3 🔁 1 💬 1 📌 0
8/ The fly’s strategy enables robustness yet flexibility, thus it may be a common blueprint for movement across species—or even for other behaviors in flies. 🐁🐱🦎
18.12.2024 17:17 — 👍 1 🔁 1 💬 1 📌 0

7/ Recurrent excitation: Drives non-groomed antennal pitch movements and keeps other motor networks in sync. ⚡️
Broadcast inhibition: Suppresses targeted antennal movement to prevent conflicting actions. ⛔️
18.12.2024 17:16 — 👍 1 🔁 1 💬 1 📌 0
6/ To understand this better, we simulated the grooming network and ran a computational neural activation screen. Two key circuit motifs emerged as the stars of this coordination process:
18.12.2024 17:14 — 👍 1 🔁 1 💬 1 📌 0
5/ Think of it as an elegant engineering solution: these central neurons enable flexibility, allowing any brain region to initiate or stop the behavior. 🛠️
18.12.2024 17:13 — 👍 1 🔁 1 💬 1 📌 0
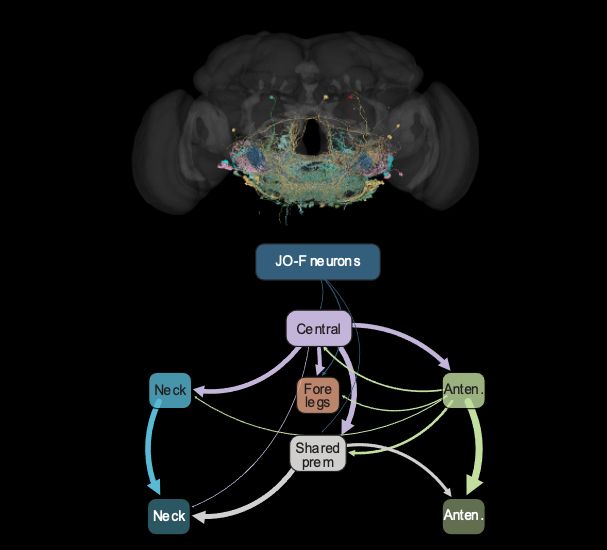
4/ So, what orchestrates these movements? Using the fly connectome, we constructed a subnetwork for antennal grooming. In this network, we discovered that a central group of neurons links motor circuits for the neck, antennae, and forelegs. 🧠 These neurons act as a hub for coordinating body parts.
18.12.2024 17:12 — 👍 2 🔁 1 💬 1 📌 1
3-2/ EVEN without antennae, the coordination between head rotations and foreleg movements remains! 😱😱😱
18.12.2024 17:10 — 👍 1 🔁 1 💬 1 📌 1
3-1/ Or, head-immobilized flies will still move their antennae and forelegs in a fascinatingly coordinated fashion. 🤯
18.12.2024 17:08 — 👍 1 🔁 1 💬 1 📌 0
An open-source physics simulator for articulated systems with contacts.
Maintained by Google DeepMind and the community. This is not an officially supported Google product.
Manipulation skill composition @ RAI Institute, robotics open source contributor + educator on the side. Substance over hype. 🇨🇱🇯🇲🤘
roboticseabass.com
CTO of Technology & Society at Google, working on fundamental AI research and exploring the nature and origins of intelligence.
AGI research @DeepMind.
Ex cofounder & CTO Vicarious AI (acqd by Alphabet),
Cofounder Numenta
Triply EE (BTech IIT-Mumbai, MS&PhD Stanford). #AGIComics
blog.dileeplearning.com
Picower Professor of Neuroscience @ MIT
Cognitive neuroscience, executive brain functions, consciousness, and bass guitar. You know, the good stuff.
ekmillerlab.mit.edu
Co-founder, Neuroblox
https://www.neuroblox.ai/
Neuroscience MSc student Zwart/Li labs @uniofstandrews.bsky.social interested in motor control! Currently recording 🐸🧠 they/them
Graduate Student in Comp Neuro/ML at Champalimaud Foundation, Lisbon.
PhD Candidate @ de Bivort lab, Harvard
Postdoc in the Litwin-Kumar lab at the Center for Theoretical Neuroscience at Columbia University.
I'm interested in multi-tasking and dimensionality.
K. Lisa Yang Brain-Body Center Postdoctoral Fellow at Steve Flavell's Lab @Picower Inst, MIT | PhD from Michael Hendricks' Lab @IPN, McGill Univ | Animal behavior | Neuroscience | Open science
Neurophysiologist working on motor control and neural population dynamics. Assistant Prof. at the Case Western Reserve University School of Medicine.
https://sauerbreilab.org/
Brains, biophysics, behaviour.
https://www.groschner-lab.org
PhD student in (developmental/comp)neuroscience. Cossart lab (INMED, Marseille). track2p.github.io
PhD-ing in robot learning 🦾🧠 Fan of FOSS, federated social networks and tinker projects. Mostly lurking here, rarely posting.
Postdoc studying locomotion across species at MIT. PhD from UCLouvain
https://decomitea.github.io/
Physiatrist, neuroscientist, gait and movement, brain and robotics enthusiast. Assistant Professor at Northwestern and Shirley Ryan AbilityLab
Postdoc at @TTIC_Connect, working on sign languages, nonmanuals, multimodality. #FirstGen formerly PhD at @LifeAtPurdue, MA at @unibogazici | she/hers
Flatiron Research Fellow | Theoretical Neuroscience and Computational Vision
https://www.cns.nyu.edu/~fiquet/
PhD Student at @gronlp.bsky.social 🐮, core dev @inseq.org. Interpretability ∩ HCI ∩ #NLProc.
gsarti.com