I will be in SF from November 10-17 🌉
If you work on something interesting and want to meet up let me know! Or if there’s a fun event i’d love some invites 😃
I’m also looking to visit robotics companies (especially startups!), if you have time lmk if I can visit!
01.11.2025 06:45 — 👍 1 🔁 0 💬 0 📌 0
1/1 neurips submission accepted! Will share more details later, covers an often overlooked aspect of on policy RL training when scaling to large scale parallelized environments
19.09.2025 17:01 — 👍 2 🔁 0 💬 0 📌 0
Rumors going around are that NeurIPS PCs had to reject ~400 papers because of venue constraints that were in the accept pile.
Hard things like this happen but the PCs and conference should explicitly tell all the authors who had this happen to them. Or create something like accept w/o presentation.
19.09.2025 16:31 — 👍 19 🔁 1 💬 1 📌 1
my partner just hopped online, very talented with a great eye for design. She’s also behind all the beautiful graphics in the Lux AI Challenge that helped us gain 100s of competitors! She’s on the job market right now so DM her if you are looking for a designer/marketer/PM!
18.09.2025 04:56 — 👍 3 🔁 0 💬 1 📌 0
what’s your next blog going to be?
i’ve been also meaning to pick it up again but writers block lol
17.09.2025 00:55 — 👍 1 🔁 0 💬 1 📌 0
It works best if the object meshes you use for diff. rendering have a corresponding segmentation mask. If there are occlusions then the default option of using SAM2 to generate segmentations will perform a little worse. That being said even if the mask has some gaps the optimization can work
09.09.2025 03:22 — 👍 1 🔁 0 💬 0 📌 0
Big thanks to Linghao Chen (author of EasyHEC) for helping out. I simply made some examples and simplified some code for reproducibility/readability.
09.09.2025 02:31 — 👍 3 🔁 0 💬 0 📌 0
Opensourcing a tool to calibrate camera extrinsics painlessly in a minute, no checkerboards! It's based on EasyHEC, using diff. rendering to optimize extrinsics given object meshes+poses. Crazy that even a piece of paper works too.
Code:
github.com/StoneT2000/s...
(paper example in next post)
09.09.2025 02:31 — 👍 25 🔁 7 💬 2 📌 0
ManiSkill3 simple example, Mujoco Playground, and the DextrahRGB paper all do very similar things.
I still think transfer techniques are useful, i’d think of these sim2real attempts as just explorations in the large scale visual DR space with parallel rendering. Both could be used together probably
19.07.2025 19:12 — 👍 1 🔁 0 💬 0 📌 0

might be the first time I made it personally on the trending developers list on github! One of the contributing factors being the lerobot sim2real code
19.07.2025 03:12 — 👍 17 🔁 0 💬 1 📌 1
Combining sim to real with cheap hardware like the so-100 really is making cutting edge robot learning so accessible and its wonderful
05.07.2025 03:20 — 👍 48 🔁 7 💬 6 📌 3
That doesn’t seem to make sense, you don’t need a RGBD camera, phone works fine. Happy to address it more if details can be shared on github if needed
05.07.2025 03:04 — 👍 1 🔁 0 💬 1 📌 0
what bug did you encounter with OpenCVCameraConfig?
05.07.2025 00:51 — 👍 1 🔁 0 💬 1 📌 0
For papers that aren’t ready / i think should be rejected due to many weaknesses, i often struggle to put anything in strengths and tend to just say some general thing. I only then elaborate more detailed (i hope) in the weaknesses section
04.07.2025 18:49 — 👍 1 🔁 0 💬 1 📌 0

My latest post: The American DeepSeek Project
Build fully open models in the US in the next two years to enable a flourishing, global scientific AI ecosystem to balance China's surge in open-source and an alternative to building products ontop of leading closed models.
buff.ly/kvJQE3I
04.07.2025 14:06 — 👍 34 🔁 6 💬 1 📌 1
Awesome to see people reproducing the accessible LeRobot zero-shot sim2real project! Trained for just 90 min in ManiSkill and deployed directly in real. Sim2real is not easy, but very rewarding when it works
Original post by Jianwei Zhang on LinkedIn www.linkedin.com/posts/jianwe...
04.07.2025 18:31 — 👍 29 🔁 6 💬 0 📌 2

Excited to announce that I will be interning at @nvidia research this summer on robotics/embodied AI! I’ll be in seattle for the summer, let me know if you want to meet up and chat! 🦾
28.06.2025 17:36 — 👍 10 🔁 0 💬 0 📌 0
June 25 EEB 248 @ 3pm - Towards Embodiment Scaling Laws in Robot Locomotion by @BoAi0110
June 25 OHE 122 @ 11am - ImVR: Immersive VR Teleoperation System for General Purpose by Yulin Liu
22.06.2025 18:51 — 👍 2 🔁 0 💬 0 📌 0
Rest of my lab has various presentations at RSS2025, please check out their awesome work!
June 25 EEB 248 @ 10am - Hardware Optimization for In-Hand Rotation by K. Fay
22.06.2025 18:51 — 👍 3 🔁 0 💬 1 📌 0
~1 hour give or take maybe 20 mins (depends how close your camera is technically), and only 8gb of GPU memory!
someone even reproduced our sim2real tutorial with lerobot during the lerobot hackathon with a google colab gpu and a macbook for robot deployment
22.06.2025 16:32 — 👍 4 🔁 0 💬 1 📌 0
The sim2real demo had some mixed success, hampered primarily by the lighting conditions of the outdoors.
At least it worked sometimes! Hindsight says that despite the weather, low-cost nature, only 1 hour of training, anything working is a miracle
22.06.2025 16:29 — 👍 9 🔁 2 💬 1 📌 0

I’ll be at #RSS2025 from June 21 to June 23!
I’ll be giving a presentation on ManiSkill3 on June 21, 5:30 PM
We will also have two live demo sessions, on June 21, 12:30-2:00PM and 6:30-8:00PM. Swing by to see live demos of zero shot RGB sim2real, cool sim demos, and VR teleop!
20.06.2025 19:44 — 👍 3 🔁 1 💬 0 📌 1
Foundations of Computer Vision
The print version was published by
Our computer vision textbook is now available for free online here:
visionbook.mit.edu
We are working on adding some interactive components like search and (beta) integration with LLMs.
Hope this is useful and feel free to submit Github issues to help us improve the text!
15.06.2025 15:45 — 👍 116 🔁 32 💬 3 📌 1
Email so far ahead is interesting. Is this just substack emails?
15.06.2025 19:00 — 👍 2 🔁 0 💬 1 📌 0
the amount of cope on the other site is crazy
15.06.2025 15:35 — 👍 3 🔁 0 💬 0 📌 0
it's happening.gif @stonet2000.bsky.social
15.06.2025 02:58 — 👍 4 🔁 1 💬 1 📌 0
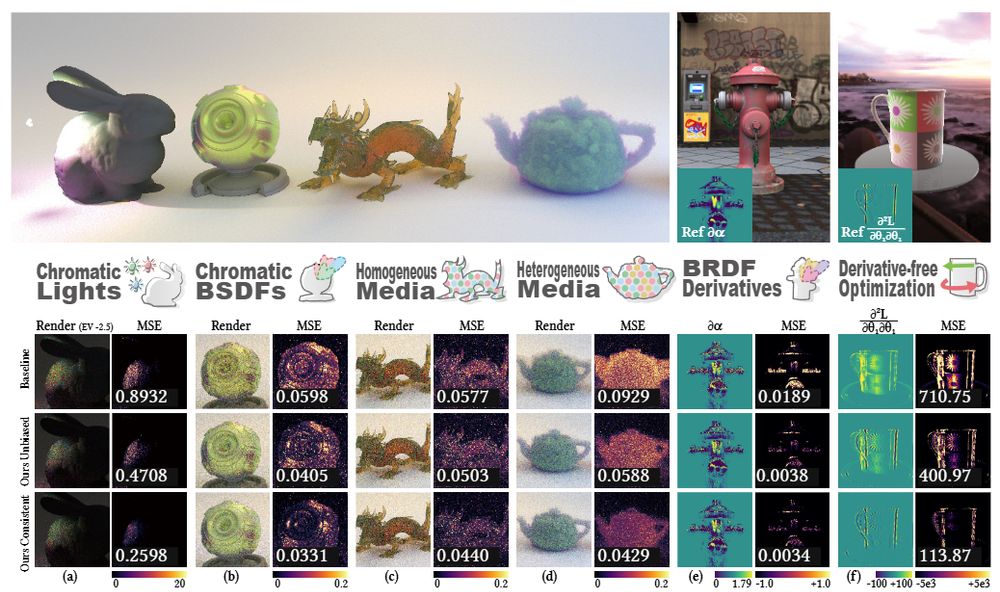
Rendering nerds! Check out our latest work "Vector-Valued Monte Carlo Integration Using Ratio Control Variates" that has just gotten the best paper award at SIGGRAPH 2025. This paper presents a method that reduces variance of a wide range of rendering and diff. rendering tasks with negligible cost.
14.06.2025 17:26 — 👍 89 🔁 22 💬 7 📌 0
i build products that spark joy ✨🍃
@DoraTool @LuxAIChallenge @headai_io @DesignLabUCSD
https://bento.me/p-isa
Editor and CEO, Zeteo
Author, ‘Win Every Argument’
British-American
Assistant professor at NUS. Scaling cooperative intelligence & infrastructure for an increasingly automated future. PhD @ MIT ProbComp / CoCoSci. Pronouns: 祂/伊
Interpretable Deep Networks. http://baulab.info/ @davidbau
Locked in and posting regularly on here now
Uses machine learning to study literary imagination, and vice-versa. Likely to share news about AI & computational social science / Sozialwissenschaft / 社会科学
Information Sciences and English, UIUC. Distant Horizons (Chicago, 2019). tedunderwood.com
Assistant Prof. at Georgia Tech | NVIDIA AI | Making robots smarter
Professor of Computing, I do research on robotics and AI. I also ski.
https://robot-learning.cs.utah.edu/thermans
Assistant Professor in Computer Science at UofT.
Robotics PhD student at @utah.edu - https://adlarkin.github.io/
The world's leading venue for collaborative research in theoretical computer science. Follow us at http://YouTube.com/SimonsInstitute.
PhD candidate at UCSD. Prev: NVIDIA, Meta AI, UC Berkeley, DTU. I like robots 🤖, plants 🪴, books 📚, and they/them pronouns 🏳️🌈
https://www.nicklashansen.com
The cyborg in me sees the cyborg in you. English/中文.
PhD @ UCSD, machine learning, spatiotemporal forecasting, uncertainty quantification, etc etc.
https://huiwenn.github.io/
https://vincent.vanhoucke.com
Google Chief Scientist, Gemini Lead. Opinions stated here are my own, not those of Google. Gemini, TensorFlow, MapReduce, Bigtable, Spanner, ML things, ...
He/him
I teach C++ & computer graphics and make videogames
Working on a medieval village building game: https://youtube.com/playlist?list=PLSGI94QoFYJwGaieAkqw5_qfoupdppxHN&cbrd=1
Check out my cozy road building traffic sim: https://t.ly/FfOwR
ML researcher, co-author Why Greatness Cannot Be Planned. Creative+safe AI, AI+human flourishing, philosophy; prev OpenAI / Uber AI / Geometric Intelligence
Rendering Engineer at Disney Animation working on Disney's Hyperion Renderer. Previously at Pixar, Dreamworks, Cornell, Penn. Views here are my own.
https://www.yiningkarlli.com
https://mastodon.gamedev.place/@yiningkarlli
Simulation and rendering nerd. Co-founder and CTO @JangaFX
Working on EmberGen and more.
Discord: vassvik @vassvik@mastodon.gamedev.place
life is short and I am in a hurry.
tkukurin.github.io